- Tổng quan
- Nội dung
- Tiêu chuẩn liên quan
- Lược đồ
- Tải về
Tiêu chuẩn TCVN 7681-3:2013 Kiểm hình học máy tiện điều khiển số có một trục chính mang phôi thẳng đừng đảo nghịch
| Số hiệu: | TCVN 7681-3:2013 | Loại văn bản: | Tiêu chuẩn Việt Nam |
| Cơ quan ban hành: | Bộ Khoa học và Công nghệ | Lĩnh vực: | Công nghiệp |
|
Ngày ban hành:
Ngày ban hành là ngày, tháng, năm văn bản được thông qua hoặc ký ban hành.
|
2013 |
Hiệu lực:
|
Đã biết
|
| Người ký: | Đang cập nhật |
Tình trạng hiệu lực:
Cho biết trạng thái hiệu lực của văn bản đang tra cứu: Chưa áp dụng, Còn hiệu lực, Hết hiệu lực, Hết hiệu lực 1 phần; Đã sửa đổi, Đính chính hay Không còn phù hợp,...
|
Đã biết
|
TÓM TẮT TIÊU CHUẨN VIỆT NAM TCVN 7681-3:2013
Nội dung tóm tắt đang được cập nhật, Quý khách vui lòng quay lại sau!
Tải tiêu chuẩn Việt Nam TCVN 7681-3:2013
 Tiêu chuẩn Việt Nam TCVN 7681-3:2013 PDF (Bản có dấu đỏ)
Tiêu chuẩn Việt Nam TCVN 7681-3:2013 PDF (Bản có dấu đỏ) Tiêu chuẩn Việt Nam TCVN 7681-3:2013 DOC (Bản Word)
Tiêu chuẩn Việt Nam TCVN 7681-3:2013 DOC (Bản Word)TIÊU CHUẨN QUỐC GIA
TCVN 7681-3:2013
ISO 13041-3:2009
ĐIỀU KIỆN KIỂM MÁY TIỆN ĐIỀU KHIỂN SỐ VÀ TRUNG TÂM TIỆN - PHẦN 3: KIỂM HÌNH HỌC CHO CÁC MÁY CÓ TRỤC CHÍNH MANG PHÔI THẲNG ĐỨNG ĐẢO NGHỊCH
Test conditions for numerically controlled turning machines and turning centres - Part 3: Geometric test for machines with inverted vertical workholding spindles
Lời nói đầu
TCVN 7681-3:2013 hoàn toàn tương đương với ISO 13041-3:2009.
TCVN 7681-3:2013 do Ban kỹ thuật tiêu chuẩn quốc gia TCVN/TC 39 Máy công cụ biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công nghệ công bố.
Bộ TCVN 7681 (ISO 13041) Điều kiện kiểm máy tiện điều khiển số và trung tâm tiện bao gồm các phần sau:
- TCVN 7681-1:2013 (ISO 13041-1:2004) Phần 1: Kiểm hình học cho các máy có một trục chính mang phôi nằm ngang;
- TCVN 7681-2:2013 (ISO 13041-2:2008) Phần 2: Kiểm hình học cho các máy có một trục chính mang phôi thẳng đứng;
- TCVN 7681-3:2013 (ISO 13041-3:2009) Phần 3: Kiểm hình học cho các máy có trục chính mang phôi thẳng đứng đảo nghịch;
- TCVN 7681-4:2007 (ISO 13041-4:2004) Phần 4: Độ chính xác và khả năng lặp lại định vị của các trục tịnh tiến và quay;
- TCVN 7681-5:2013 (ISO 13041-5:2006) Phần 5: Độ chính xác của lượng chạy dao, tốc độ quay và phép nội suy;
- TCVN 7681-6:2013 (ISO 13041-6:2009) Phần 6: Độ chính xác của mẫu kiểm được gia công lần cuối;
- TCVN 7681-7:2007 (ISO 13041-7:2004) Phần 7: Đánh giá đặc tính tạo công tua trong các mặt phẳng tọa độ;
- TCVN 7681-8:2007 (ISO 13041-8:2004) Phần 8: Đánh giá các biến dạng nhiệt.
ĐIỀU KIỆN KIỂM MÁY TIỆN ĐIỀU KHIỂN SỐ VÀ TRUNG TÂM TIỆN - PHẦN 3: KIỂM HÌNH HỌC CHO CÁC MÁY CÓ TRỤC CHÍNH MANG PHÔI THẲNG ĐỨNG ĐẢO NGHỊCH
Test conditions for numerically controlled turning machines and turning centres - Part 3: Geometric test for machines with inverted vertical workholding spindles
1. Phạm vi áp dụng
Tiêu chuẩn này quy định các phép kiểm hình học cho các máy tiện điều khiển số (NC) thông dụng và các trung tâm tiện có các trục chính mang phôi thẳng đứng đảo nghịch, cũng như các dung sai tương ứng có thể áp dụng, có viện dẫn TCVN 7011-1 (ISO 230-1) và TCVN 7011-7 (ISO 230-7).
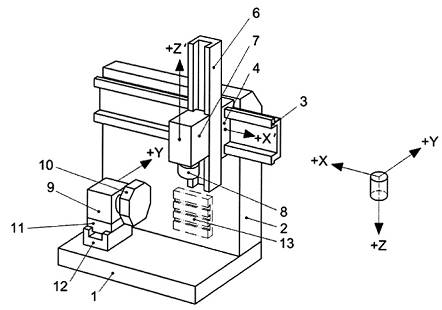
Tiêu chuẩn này giới thiệu các khái niệm hoặc các dạng cấu hình khác nhau và đặc trưng chung của các máy tiện NC và các trung tâm tiện với các trục chính thẳng đứng đảo nghịch. Tiêu chuẩn này cũng đưa ra thuật ngữ và kí hiệu của các trục điều khiển (xem các Hình 1, 2, 3 và 4).
Tiêu chuẩn này chỉ áp dụng để kiểm tra xác nhận độ chính xác của máy, không áp dụng để kiểm vận hành máy (ví dụ: rung động, độ ồn bất thường, chuyển động giật cục của các bộ phận) cũng như các đặc tính của máy (ví dụ: tốc độ quay, lượng chạy dao), các phép kiểm này thường được thực hiện trước khi kiểm độ chính xác.
2. Tài liệu viện dẫn
Các tài liệu viện dẫn sau là cần thiết cho việc áp dụng tiêu chuẩn này. Đối với các tài liệu viện dẫn ghi năm công bố thì áp dụng phiên bản được nêu. Đối với các tài liệu viện dẫn không ghi năm công bố thì áp dụng phiên bản mới nhất, bao gồm cả các sửa đổi (nếu có).
TCVN 7011 -1:2007 (ISO 230-1:1996) Quy tắc kiểm máy công cụ - Phần 1: Độ chính xác hình học của máy khi vận hành trong điều kiện không tải hoặc gia công tinh;
TCVN 7011-7:2013 (ISO 230-7:2006) Quy tắc kiểm máy công cụ - Phần 7: Độ chính xác hình học của các trục của chuyển động quay.
3. Thuật ngữ và định nghĩa
Tiêu chuẩn này áp dụng các thuật ngữ và định nghĩa sau.
3.1. Máy tiện (turning machine)
Máy công cụ trong đó chuyển động chính là chuyển động quay của chi tiết gia công còn (các) dụng cụ cắt đứng yên.
3.2. Điều khiển bằng tay (manual control)
Chế độ vận hành trong đó mỗi chuyển động của máy được thực hiện một cách riêng rẽ và được điều khiển bởi người vận hành máy.
3.3. Điều khiển số (NC) (numerical control)
Điều khiển số bằng máy tính (CNC) (computerized numerical control)
Điều khiển tự động một quá trình được thực hiện bởi một thiết bị sử dụng các dữ liệu dạng số được nạp vào trong quá trình làm việc.
[ISO 2806:1994].
3.4. Máy tiện điều khiển bằng tay (manually controlled turning machine)
Máy tiện trong đó toàn bộ các bước của quá trình gia công được điều khiển hoặc khởi động bởi người vận hành mà không có bất kì sự trợ giúp nào từ chương trình điều khiển số.
3.5. Máy tiện điều khiển số (numerically controlled turning machine)
Máy tiện NC (NC turning machine)
Máy tiện hoạt động dưới sự điều khiển số (NC) hoặc điều khiển số bằng máy tính (CNC).
3.6. Trung tâm tiện (turning centre)
Máy tiện điều khiển số (NC) được trang bị (các) dụng cụ cắt được dẫn động công suất và có khả năng định hướng trục chính mang phôi xung quanh trục của nó.
CHÚ THÍCH: Trung tâm tiện có thể bao gồm một số tính năng bổ sung như thay dao tự động từ ụ rơvonve và/hoặc ổ chứa dụng cụ.
3.7. Máy tiện điều khiển số có trục chính mang phôi thẳng đứng đảo nghịch (numerically controlled turning machine with inverted vertical workholding spindle)
Máy tiện NC có trục chính mang phôi thẳng đứng đảo nghịch (NC turning machine with inverted vertical workholding spindle)
Máy tiện NC trong đó chi tiết gia công được lắp trên trục chính mang phôi thẳng đứng đảo nghịch được trang bị bộ phận kẹp phôi tại đầu phía dưới của trục chính mang phôi.
CHÚ THÍCH: Với các kiểu máy tiện có trục chính mang phôi thẳng đứng khác, xem TCVN 7681-2 (ISO 13041-2).
3.8. Trung tâm tiện có trục chính mang phôi thẳng đứng đảo nghịch (turning centre with inverted vertical workholding spindle)
Trung tâm tiện có trục chính mang phôi thẳng đứng đảo nghịch được trang bị bộ phận kẹp phôi tại đầu phía dưới của trục chính mang phôi.
CHÚ THÍCH 1: Trung tâm tiện kiểu này có thể trang bị thêm một số tính năng như thay dao tự động từ ổ chứa dụng cụ hoặc chuyển động theo phương trục Y.
CHÚ THÍCH 2: Với các kiểu trung tâm tiện có trục chính mang phôi thẳng đứng khác, xem TCVN 7681-2 (ISO 13041-2).
4. Lưu ý ban đầu
4.1. Đơn vị đo
Trong tiêu chuẩn này, tất cả các kích thước thẳng, các sai lệch và các dung sai tương ứng được tính bằng milimét, các kích thước góc được tính bằng độ, các sai lệch góc và các dung sai tương ứng được tính bằng các tỷ số, nhưng trong một số trường hợp để cho rõ ràng và dễ hiểu có thể sử dụng đơn vị micrô-radian (mrad) hoặc giây. Cần lưu ý sự tương đương của các biểu diễn sau:
0,010/1000 = 10x10-6 = 10 mrad » 2”
4.2. Viện dẫn TCVN 7011-1 (ISO 230-1) và TCVN 7011-7 (ISO 230-7)
Để áp dụng tiêu chuẩn này, cần viện dẫn TCVN 7011-1 (ISO 230-1) hoặc TCVN 7011-7 (ISO 230-7) đặc biệt đối với việc lắp đặt máy trước khi kiểm, việc làm nóng trục chính và các bộ phận chuyển động khác, mô tả các phương pháp đo và độ chính xác khuyến nghị của thiết bị kiểm.
Trong ô “Xem” của các phép kiểm tra được mô tả trong Điều 5 và 6, các hướng dẫn được tham khảo tới các nội dung tương ứng của TCVN 7011-1 (ISO 230-1) và/hoặc TCVN 7011-7 (ISO 230-7) trong trường hợp phép kiểm tuân theo các quy định của các tiêu chuẩn đó. Các dung sai được đưa ra đối với mỗi phép kiểm (xem G1 tới G20).
4.3. Cân bằng máy
Trước khi thực hiện các phép kiểm đối với một máy nào đó, máy đó phải được cân bằng theo khuyến nghị của nhà cung cấp/nhà sản xuất (xem TCVN 7011-1 (ISO 230-1:1996, 3.1.1)).
4.4. Trình tự kiểm
Trình tự các phép kiểm được đưa ra trong tiêu chuẩn này không quy định cho kiểm thực tế. Để thực hiện việc lắp đặt các dụng cụ hoặc đồng hồ đo dễ dàng, có thể thực hiện các phép kiểm theo trình tự bất kỳ.
4.5. Thực hiện các phép kiểm
Khi kiểm máy, không phải lúc nào cũng cần thiết hoặc có thể thực hiện tất cả các phép kiểm được mô tả trong tiêu chuẩn này. Khi kiểm tra nghiệm thu, người sử dụng lựa chọn các phép kiểm có liên quan đến các bộ phận và/hoặc các đặc tính của máy mà họ quan tâm theo thỏa thuận với nhà cung cấp/nhà chế tạo. Các phép kiểm này phải được quy định rõ ràng trong hợp đồng mua máy. Viện dẫn tiêu chuẩn này cho việc kiểm tra nghiệm thu mà không quy định các phép kiểm được tiến hành hoặc không có sự thỏa thuận về chi phí liên quan, không thể được xem là ràng buộc đối với bất kỳ bên nào tham gia hợp đồng.
4.6. Dụng cụ đo
Các dụng cụ đo được chỉ dẫn dùng trong các phép kiểm được dùng trong các Điều 5 và 6 chỉ là các ví dụ. Có thể sử dụng các dụng cụ đo khác có cùng đại lượng và tối thiểu có cùng độ không đảm bảo đo và có cùng độ phân giải. Các cảm biến dịch chuyển thẳng phải có độ phân giải 0,001 mm hoặc chính xác hơn.
4.7. Sơ đồ
Trong tiêu chuẩn này, để đơn giản, các hình vẽ trong các Điều 5 và 6 chỉ minh họa cho một kiểu máy.
4.8. Bù bằng sử dụng phần mềm
Khi các tiện ích phần mềm được tích hợp sẵn để dùng cho việc bù hình học, định vị, tạo công tua và sai lệch do nhiệt, việc sử dụng chúng trong các phép kiểm này phải trên cơ sở thỏa thuận giữa người sử dụng và nhà sản xuất/nhà cung cấp. Khi sử dụng bù bằng phần mềm thì phải được ghi trong báo cáo kiểm.
4.9. Dung sai nhỏ nhất
Khi thiết lập dung sai cho phép kiểm hình học đối với một chiều dài đo khác so với giá trị trong tiêu chuẩn này (xem 2.3.1.1 của TCVN 7011-1:2007 (ISO 230-1:1996)), thì phải lưu ý rằng giá trị nhỏ nhất của dung sai là 0,005 mm.
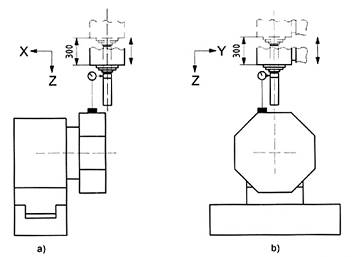
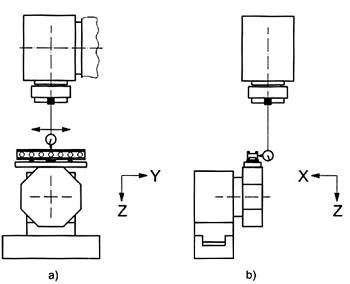
4.10. Phân loại máy, các mô tả, thuật ngữ và kí hiệu của các trục
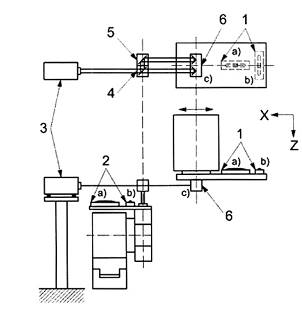
Các máy được xem xét trong tiêu chuẩn này được chia thành ba dạng cấu hình cơ bản, như thể hiện Hình 1.
Kiểu máy công cụ này cũng có thể được xem xét như một đơn vị gia công trong một hệ FMS (hệ thống sản xuất linh hoạt).
|
|
|
| a) Cấu hình cơ bản | b) Ụ phôi có chuyển động quanh trục B |
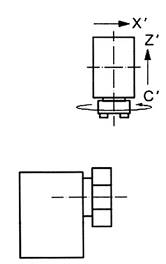
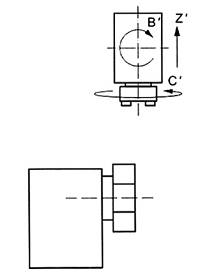
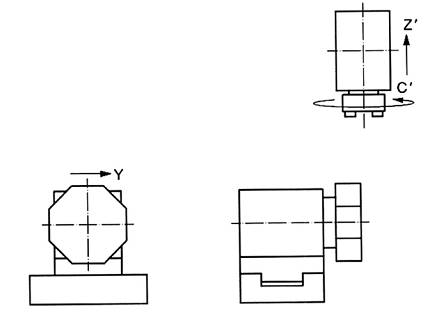
c) Ụ rơvonve có chuyển động theo trục Y
Hình 1 - Ba dạng cấu hình máy có một ụ phôi và một ụ rơvonve
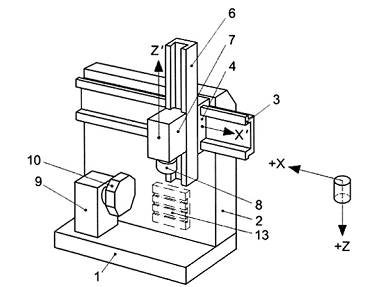
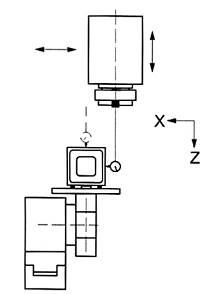
Tên các bộ phận được nêu trong Bảng 1.
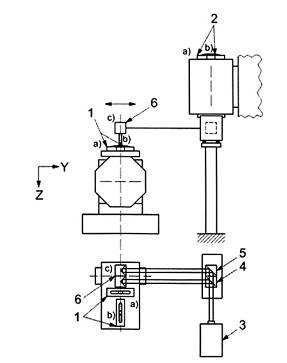
Hình 2 - Ví dụ về máy tiện đứng đảo nghịch
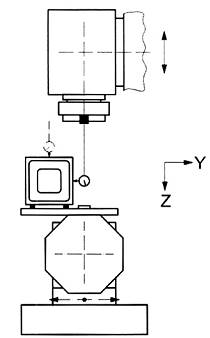
Tên các bộ phận được nêu trong Bảng 1.
Hình 3 - Ví dụ về trung tâm tiện đứng đảo nghịch
(đầu ụ rơvonve có chuyển động theo phương trục Y)
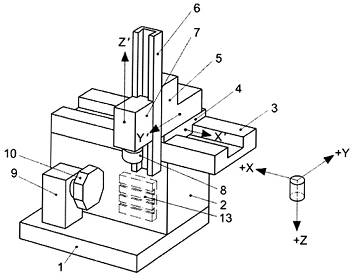
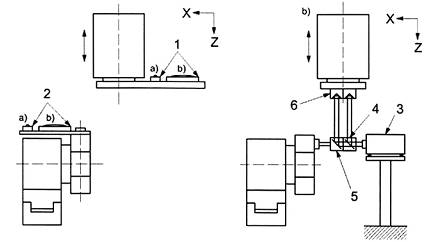
Tên các bộ phận được nêu trong Bảng 1.
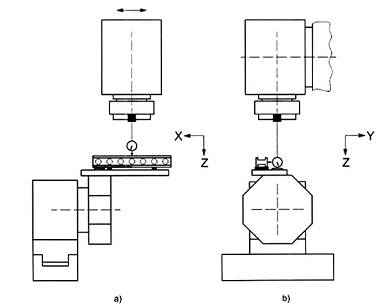
Hình 4 - Ví dụ về trung tâm tiện đứng đảo nghịch
(trục chính có chuyển động theo phương trục Y)
Bảng 1 - Tên gọi các bộ phận (xem các Hình 2, 3 và 4)
| Số tham chiếu | Tiếng Việt | Tiếng Anh | Tiếng Pháp |
| 1 | Đế | Base | Base |
| 2 | Trụ máy | Column | Montant |
| 3 | Xà ngang | Cross-rail | Traverse porte-chariot |
| 4 | Xe dao, theo trục X | Carriage, X axis | Chariot, X axe |
| 5 | Xe dao, theo trục Y | Carriage, Y axis | Chariot, Y axe |
| 6 | Đường dẫn hướng của ụ đầu trục chính mang phôi | Workholding spindle head stock slideway | Glissière de la poupée fixe de la broche |
| 7 | Ụ đầu trục chính mang phôi, trục Z | Workholding spindle head stock, Z axis | Poupée fixe de la broche, Z axe |
| 8 | Trục chính mang phôi | Workholding spindle | Broche porte-pièce |
| 9 | Đầu ụ rơvonve | Turret head | Chariot |
| 10 | Ụ rơvonve | Turret | Tourelle |
| 11 | Bàn trượt đầu ụ rơvonve, theo trục Y | Turret head carriage, Y axis | Chariot du porte-tourelle, Y axe |
| 12 | Đường hướng đầu ụ rơvonve | Turret head slideway | Coulisseau du porte- tourelle |
| 13 | Tấm dao | Tool plate | Plateau à outils |
4.11. Ụ rơvonve
Các trung tâm tiện đứng không chỉ có các dụng cụ đứng yên mà còn có các dụng cụ xoay được dẫn động công suất được lắp trên ụ rơvonve hoặc trên tấm dao (số 13 trên các Hình 2, 3 và 4). Khi số lượng dụng cụ có thể được sử dụng vượt quá khả năng chứa của ụ rơvonve, máy có thể được trang bị thêm cơ cấu thay dụng cụ cắt tự động ngay trong ụ rơvonve hoặc thay cả ụ rơvonve. Một cơ cấu thay dụng cụ tự động cũng có thể cần thiết cho các trục chính được dẫn động công suất trong đó các dụng cụ có thể lắp một cách tự động. Tuy nhiên, tiêu chuẩn này không cung cấp các phương pháp kiểm tra cho các hoạt động của cơ cấu thay dao tự động.
4.12. Loại cỡ kích thước máy
Máy được phân thành ba loại cỡ kích thước trên cơ sở các tiêu chí được quy định trong Bảng 2.
Bảng 2 - Dải cỡ kích thước máy
| Tiêu chí | Loại 1 | Loại 2 | Loại 3 |
| Đường kính danh nghĩa của mâm cặp, d | d ≤ 250 | 250 < d ≤ 400 | d > 400 |
| Đường kính tiện lớn nhất, D | D ≤ 315 | 315 < D ≤ 500 | 500 < D |
| CHÚ THÍCH 1: Các tiêu chí chọn theo quy định của nhà sản xuất. CHÚ THÍCH 2: Đường kính danh nghĩa của mâm cặp được xác định theo TCVN 4279-1 (ISO 3442-1) và TCVN 4279-2 (ISO 3442-2). | |||
5. Kiểm hình học
5.1. (Các) Trục chính mang phôi
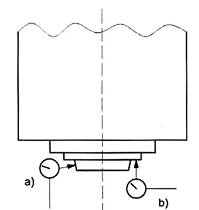
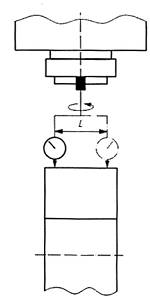
| Đối tượng | G1 | ||||
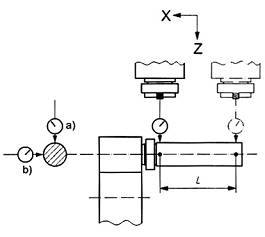
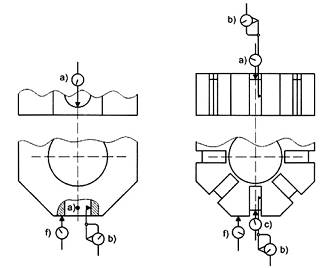
| Kiểm đầu mút của trục chính mang phôi: a) độ đảo của đường kính định tâm; b) độ đảo mặt đầu của mặt trục chính. | |||||
| Sơ đồ
| |||||
| Dung sai | Sai lệch đo được | ||||
|
| Loại 1 | Loại 2 | Loại 3 |
| |
| a) | 0,005 | 0,008 | 0,012 |
| |
| b) | 0,008 | 0,010 | 0,015 |
| |
| Dụng cụ đo Cảm biến dịch chuyển thẳng | |||||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996), 5.6.1.2.2 và 5.6.3.2 Các phép đo phải được thực hiện trên tất cả các trục chính mang phôi a) 5.6.1.2.2 Khi bề mặt là mặt côn, đầu đo của cảm biến dịch chuyển thẳng phải đặt vuông góc với bề mặt tiếp xúc. b) 5.6.3.2 Các phép đo phải được thực hiện trên đường kính lớn nhất. | |||||
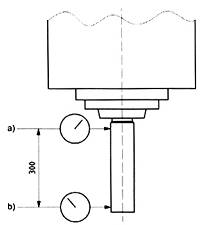
| Đối tượng | G2 | ||||
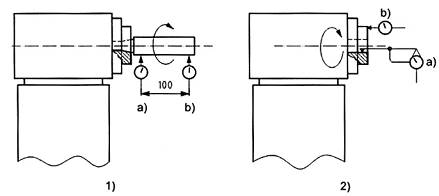
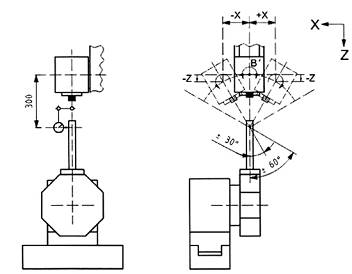
| Kiểm độ đảo hướng kính của lỗ trục chính mang phôi a) tại đầu mút trục chính; b) tại vị trí cách đầu mút trục chính 300 mm. Xem phép kiểm R1. | |||||
| Sơ đồ
| |||||
| Dung sai | Sai lệch đo được | ||||
|
| Loại 1 | Loại 2 | Loại 3 |
| |
| a) | 0,010 | 0,015 | 0,020 |
| |
| b) | 0,015 | 0,020 | 0,025 |
| |
| Dụng cụ đo Cảm biến dịch chuyển thẳng và trục kiểm chuyên dùng | |||||
| Xem và viện dẫn TCVN 7011-1 (ISO 230-1) 5.6.1.2.3 Quay trục chính từ từ ít nhất hai vòng tại mỗi vị trí đo khi đo độ đảo trục chính. Các phép đo phải được lặp lại ít nhất bốn lần, trục kiểm được quay đi 90° so với trục chính. Ghi lại giá trị trung bình của các chỉ số. Cần thực hiện theo các bước để giảm tối thiểu ảnh hưởng của lực cản tiếp tuyến trên đầu đo của dụng cụ đo. Phải thực hiện các phép đo trên tất cả các trục chính mang phôi. | |||||
5.2. Quan hệ giữa (các) trục chính mang phôi và các trục của chuyển động tịnh tiến
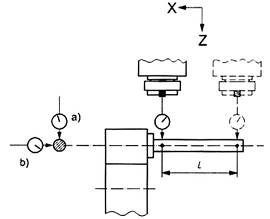
| Đối tượng | G3 | ||||
| Kiểm độ song song giữa chuyển động theo phương trục Z và trục quay của trục chính mang phôi a) trong mặt phẳng ZX; b) trong mặt phẳng YZ. | |||||
| Sơ đồ
| |||||
| Dung sai Đối với chiều dài đo là 300 hoặc tổng các dịch chuyển tới 300 | Sai lệch đo được | ||||
|
| Loại 1 | Loại 2 | Loại 3 |
| |
| a) | 0,010 | 0,015 | 0,020 |
| |
| b) | 0,015 | 0,020 | 0,025 |
| |
| Dụng cụ đo Cảm biến dịch chuyển thẳng và trục kiểm chuyên dùng | |||||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996) 5.4.1.2.1, 5.4.2.2.3 Đối với mỗi mặt phẳng thực hiện đo, quay trục chính mang phôi để tìm vị trí độ đảo trung bình, sau đó di chuyển ụ trục chính theo phương Z và ghi lại hiệu số lớn nhất của các chỉ số. Cách khác, lấy các chỉ số dọc theo trục kiểm tại một góc quay, sau đó quay trục chính đi 180° và tiếp tục lấy các giá trị đo tại các vị trí tương ứng trước đó. Hiệu số lớn nhất giữa hai giá trị đo trung bình chính là sai lệch độ song song. Phép kiểm này áp dụng cho tất cả các trục chính mang phôi và các chuyển động theo phương trục Z. | |||||
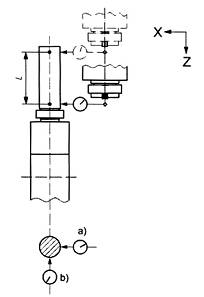
| Đối tượng | G4 | |||
| Kiểm độ vuông góc giữa chuyển động theo trục phương Z và chuyển động theo phương trục X trong mặt phẳng ZX. | ||||
| Sơ đồ
| ||||
| Dung sai Đối với chiều dài đo là 300 hoặc tổng các dịch chuyển tới 300 | Sai lệch đo được | |||
| Loại 1 | Loại 2 | Loại 3 |
| |
| 0,010 | 0,015 | 0,020 |
| |
| Dụng cụ đo Cảm biến dịch chuyển thẳng, ke vuông và tấm phẳng chuyên dùng | ||||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996) 5.5.2.2.1 và 5.5.2.2.4 Đặt ke vuông lên một tấm phẳng chuyên dùng được gắn cố định trên tấm dao hoặc ụ rơvonve, song song với chuyển động theo phương trục X. Gắn cảm biến dịch chuyển thẳng lên đầu mút của trục chính mang phôi đã được khóa sao cho đầu đo của cảm biến tiếp xúc với bề mặt ke vuông theo trục Z, di chuyển ụ trục chính mang phôi theo phương Z. Tốt nhất là gắn cảm biến dịch chuyển thẳng lên vỏ hộp trục chính để tránh việc phải khóa trục chính. Sai lệch độ vuông góc là hiệu số lớn nhất của các chỉ số trên cảm biến dịch chuyển thẳng. | ||||
| Đối tượng | G5 | |||
| Kiểm độ vuông góc giữa chuyển động theo phương trục Z và chuyển động theo phương trục Y trong mặt phẳng YZ. | ||||
| Sơ đồ
| ||||
| Dung sai Đối với chiều dài đo là 300 hoặc tổng các dịch chuyển tới 300 | Sai lệch đo được | |||
| Loại 1 | Loại 2 | Loại 3 |
| |
| 0,015 | 0,020 | 0,025 |
| |
| Dụng cụ đo Cảm biến dịch chuyển thẳng, ke vuông và tấm phẳng chuyên dùng | ||||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996) 5.5.2.2.1, 5.5.2.2.4 Đặt ke vuông lên một tấm phẳng chuyên dùng được gắn cố định trên bàn giao hoặc ụ rơvonve, song song với chuyển động theo phương trục Y. Gắn cảm biến dịch chuyển thẳng lên đầu mút của trục chính mang phôi đã được khóa sao cho đầu đo của cảm biến tiếp xúc với bề mặt ke vuông theo trục Z, di chuyển ụ trục chính mang phôi theo phương Z. Tốt nhất là gắn cảm biến dịch chuyển thẳng lên vỏ hộp trục chính để tránh việc phải khóa trục chính. Sai lệch độ vuông góc là hiệu số lớn nhất của các giá trị đọc của cảm biến dịch chuyển thẳng. | ||||
5.3. Các sai lệch góc của trục chuyển động tịnh tiến
| Đối tượng | G6 | ||
| Kiểm sai lệch góc của chuyển động theo phương trục Z a) trong mặt phẳng YZ, EAZ, b) trong mặt phẳng ZX, EBZ. CHÚ THÍCH: Phép kiểm này chỉ áp dụng cho khu vực gia công và không áp dụng cho khu vực vận hành phụ. | |||
| Sơ đồ | |||
|
| |||
| Phương pháp sử dụng nivô chính xác | Phương pháp sử dụng giao thoa kế laze | ||
| CHÚ DẪN: 1 nivô đo 3 đầu laze 5 bộ nắn chùm tia phản xạ 2 nivô chuẩn 4 giao thoa kế 6 các gương phản xạ | |||
| Dung sai Đối với a) và b), với hành trình theo trục Z tới 500 0,040/1000 | Sai lệch đo được | ||
| Dụng cụ đo Cảm biến dịch chuyển thẳng và tấm phẳng chuyên dùng, thiết bị đo laze hoặc ống tự chuẩn trực | |||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996) 5.2.3.2.2.1, 5.2.3.2 2.2, 5.2.3.2.2.3 Đặt nivô chính xác lên tấm phẳng chuyên dùng được gắn cố định trên đầu mút trục chính theo phương ngang. Phải thực hiện phép đo theo hai hướng tại ít nhất ba vị trí cách đều nhau dọc theo cả hai hướng chuyển động. Hiệu số giữa các giá trị đọc lớn nhất và nhỏ nhất chính là sai lệch góc. | |||
| Đối tượng | G7 | |
| Kiểm sai lệch góc của chuyển động theo phương trục X a) trong mặt phẳng ZX, EBX (lắc dọc), b) trong mặt phẳng YZ, EAX (lắc xoay), c) trong mặt phẳng XY, ECX (lắc ngang). CHÚ THÍCH: Phép kiểm này chỉ áp dụng cho khu vực gia công. | ||
| Sơ đồ | ||
|
| ||
| CHÚ DẪN: 1 nivô đo 3 đầu laze 5 bộ nắn chùm tia phản xạ 2 nivô chuẩn 4 giao thoa kế 6 các gương phản xạ | ||
| Dung sai Đối với a) và b) và c), với hành trình theo trục X tới 500: 0,040/1000 | Sai lệch đo được | |
| Dụng cụ đo a) Nivô chính xác hoặc ống tự chuẩn trực và gương phản xạ hoặc thiết bị đo laze b) Nivô chính xác c) Ống tự chuẩn trực và gương phản xạ hoặc thiết bị đo laze | ||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996) 5.2.3.2.2.1, 5.2.3.2.2.2, 5.2.3.2.2.3 Các phép đo phải được thực hiện tại ít nhất ba vị trí cách đều nhau dọc theo cả hai phương chuyển động theo trục X. Hiệu số giữa các giá trị đọc lớn nhất và các giá trị đọc nhỏ nhất chính là sai lệch góc. | ||
| Đối tượng | G8 | |
| Kiểm sai lệch góc của chuyển động theo phương trục Y a) trong mặt phẳng YZ, EAY (lắc dọc), b) trong mặt phẳng ZX, EBY (lắc xoay), c) trong mặt phẳng XY, ECY (lắc ngang). | ||
| Sơ đồ
| ||
| CHÚ DẪN: 1 nivô đo 3 đầu laze 5 bộ nắn chùm tia phản xạ 2 nivô chuẩn 4 giao thoa kế 6 các gương phản xạ | ||
| Dung sai Đối với a) và b) và c), với hành trình theo trục Y tới 500: 0,1/1000 | Sai lệch đo được | |
| Dụng cụ đo a) Nivô chính xác, ống tự chuẩn hoặc thiết bị đo laze, tấm phẳng chuyên dùng b) Nivô chính xác, tấm phẳng chuyên dùng c) Ống tự chuẩn trực hoặc thiết bị đo laze, tấm phẳng chuyên dùng | ||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996) 5.2.3.1.2.1, 5.2.3.2.2.2, 5.2.3.2.2.3 Đặt thiết bị đo (ni vô chính xác, gương phản xạ) lên tấm phẳng chuyên dùng được gắn cố định trên tấm dao hoặc ụ rơvonve, và gắn cố định tấm thứ hai trên đầu mút trục chính. Các phép đo phải được thực hiện ít nhất tại ba điểm cách đều nhau dọc theo cả hai hướng chuyển động. Hiệu số giữa các giá trị đọc lớn nhất và nhỏ nhất chính là sai lệch góc. | ||
| Đối tượng | G9 | |
| Kiểm độ thẳng của chuyển động theo phương trục X a) trong mặt phẳng thẳng đứng ZX, EZX, b) trong mặt phẳng ngang XY, EYX. | ||
| Sơ đồ
| ||
| Dung sai a) và b) 0,02 trên chiều dài đo 300 | Sai lệch đo được | |
| Dụng cụ đo Trường hợp a) và b), thước kiểm độ thẳng, căn mẫu điều chỉnh được và cảm biến dịch chuyển thẳng hoặc thiết bị đo quang học | ||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996), 5.2.1.2.1.1 và 5.2.3.2.1.1 Nếu ụ rơvonve có thể di chuyển được theo phương trục Y, thì định vị trí của ụ sao cho đường trục trung bình của trục chính mang phôi nằm trên một đường thẳng với lỗ gá dụng cụ trên ụ rơvonve. Khóa ụ trước trục chính ở vị trí gần ụ rơvonve. Đặt dụng cụ đo thẳng chuẩn (thước kiểm độ thẳng, gương phản xạ thẳng, kính viễn vọng ngắm thẳng) lên ụ rơvonve sao cho song song với chuyển động theo phương trục X. CHÚ THÍCH: "Song song" ở đây có nghĩa là các chỉ số của cảm biến tại cả hai đầu của khoảng dịch chuyển là như nhau vả trong trường hợp này hiệu số lớn nhất giữa giá trị đọc chính là sai lệch độ thẳng. Gắn cảm biến dịch chuyển thẳng, giao thoa kế hoặc bia lên trục chính gần với vị trí của phôi gia công. Với các máy sử dụng các khối dụng cụ lắp trên tấm dao, yêu cầu một hành trình rất dài theo trục X, một thước kiểm độ thẳng ngắn hơn có thể được lắp lên trục chính mang phôi cùng với cảm biến dịch chuyển thẳng được gắn lên ụ rơvonve và tấm dao. Trong cách gá đặt này, việc đặt lại cảm biến dịch chuyển thẳng là cần thiết khi đầu của thước kiểm độ thẳng chạm tới. Phương pháp này có thể được sử dụng nhiều trong thực tế để đo được toàn bộ hành trình hơn là sử dụng một thước kiểm độ thẳng rất dài gá công xôn trên ụ rơvonve. | ||
| Đối tượng | G10 | |
| Kiểm độ thẳng của chuyển động theo phương trục Z a) trong mặt phẳng XZ, EXZ, b) trong mặt phẳng YZ, EYZ. | ||
| Sơ đồ
| ||
| Dung sai a) và b) 0,02 trên chiều dài đo 300 | Sai lệch đo được | |
| Dụng cụ đo Trường hợp a) và b), ke vuông chính xác, căn mẫu có thể điều chỉnh được và cảm biến dịch chuyển thẳng hoặc các thiết bị đo quang học. | ||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996), 5.2.1.2.1.1, 5.2.3.2.1.1 Dụng cụ đo thẳng chuẩn (gương phản xạ thẳng, kính viễn vọng ngắm thẳng) phải được đặt lên ụ rơvonve sao cho song song với chuyển động theo phương trục Z. CHÚ THÍCH: "Song song" ở đây có nghĩa là các giá trị đọc của cảm biến đọc tại cả hai đầu của khoảng dịch chuyển là như nhau và trong trường hợp này hiệu số lớn nhất giữa các giá trị đọc chính là sai lệch độ thẳng. Gắn cảm biến dịch chuyển thẳng, giao thoa kế hoặc bia lên phần đầu của trục chính mang phôi, gần với vị trí của chi tiết gia công. Đường thẳng đo phải gần với trục quay của trục chính mang phôi. Cách khác, có thể sử dụng phép kiểm được thiết lập theo G3 (trục kiểm được gắn lên trục chính mang phôi và cảm biến dịch chuyển thẳng được gắn lên ụ rơvonve). | ||
| Đối tượng | G11 | |
| Kiểm độ thẳng của chuyển động theo phương trục Y a) trong mặt phẳng thẳng đứng YZ, EZY, b) trong mặt phẳng ngang XY, EXY. | ||
| Sơ đồ
| ||
| Dung sai a) và b) 0,02 trên chiều dài đo 300 | Sai lệch đo được | |
| Dụng cụ đo Đối với a) và b), thước kiểm độ thẳng, căn mẫu điều chỉnh được và cảm biến dịch chuyển thẳng | ||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996) 5.2.1.2.1.1, 5.2.3.2.1.1 Dụng cụ đo thẳng chuẩn (gương phản xạ thẳng, kính viễn vọng ngắm thẳng) phải được đặt lên ụ rơvonve sao cho song song với chuyển động theo phương trục Y. CHÚ THÍCH: “Song song” ở đây có nghĩa là các giá trị đọc của cảm biến tại cả hai đầu của khoảng dịch chuyển là như nhau và trong trường hợp này hiệu số lớn nhất giữa các giá trị đọc chính là sai lệch độ thẳng. Gắn cảm biến dịch chuyển thẳng, giao thoa kế hoặc bia lên phần đầu của trục chính mang phôi, gần với vị trí của chi tiết. Đường thẳng đo phải gần với trục quay của trục chính mang phôi. | ||
5.4. Ụ dụng cụ và các dụng cụ được dẫn động công suất
5.4.1. Mặt lắp dụng cụ của ụ rơvonve
| Đối tượng | G12 | |
| Kiểm độ vuông góc của các mặt lắp dụng cụ của ụ rơvonve so với đường tâm trục chính mang phôi. CHÚ THÍCH: Phép kiểm này áp dụng cho các mặt lắp dụng cụ của ụ rơvonve vuông góc với đường tâm trục chính mang phôi. | ||
| Sơ đồ
CHÚ DẪN: L là chiều dài đo | ||
| Dung sai 0,02/100 L = 100 | Sai lệch đo được | |
| Dụng cụ đo Cảm biến dịch chuyển thẳng | ||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996), 5.5.1.2.1, 5.5.1.2.4 Lặp lại phép kiểm này cho từng mặt lắp dụng cụ trên ụ rơvonve. | ||
| Đối tượng | G13 | |
| Kiểm độ vuông góc của các mặt lắp dụng cụ của ụ rơvonve với chuyển động theo phương trục X a) trong mặt phẳng ZX, b) trong mặt phẳng XY. CHÚ THÍCH: Phép kiểm này áp dụng cho tất cả các mặt lắp dụng cụ của ụ rơvonve song song với mặt phẳng YZ. | ||
| Sơ đồ
CHÚ DẪN: L chiều dài đo | ||
| Dung sai a) và b) 0,02 đối với L = 100 | Sai lệch đo được | |
| Dụng cụ đo Trục kiểm và cảm biến dịch chuyển thẳng | ||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996), 5.5.1.2.1, 5.5.1.2.4 Lặp lại phép kiểm này cho từng mặt lắp dụng cụ trên ụ rơvonve. | ||
5.4.2. Lỗ dụng cụ của ụ rơvonve
| Đối tượng | G14 | |
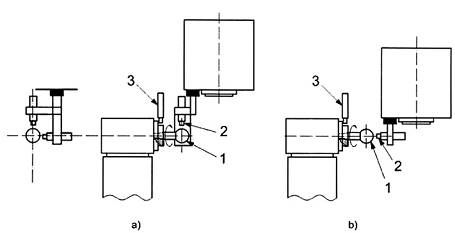
| Kiểm độ song song giữa đường trục của lỗ lắp dụng cụ của ụ rơvonve và chuyển động theo phương trục Z a) trong mặt phẳng ZX, b) trong mặt phẳng YZ. CHÚ THÍCH: Phép kiểm này áp dụng cho các lỗ lắp dụng cụ của ụ rơvonve song song với chuyển động theo phương trục Z. | ||
| Sơ đồ
CHÚ DẪN: L chiều dài đo | ||
| Dung sai a) và b): 0,02 đối với L = 100 | Sai lệch đo được | |
| Dụng cụ đo Trục kiểm và cảm biến dịch chuyển thẳng | ||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996), 5.4.2.2.3 Lặp lại phép kiểm cho mỗi lỗ lắp dụng cụ trên ụ rơvonve. Gắn trục kiểm vào lỗ lắp dụng cụ của ụ rơvonve và gắn cảm biến dịch chuyển thẳng trên trục chính mang phôi sao cho đầu dò của nó chạm vào trục kiểm trong mặt phẳng ZX/YZ. Tốt hơn là gắn cảm biến dịch chuyển thẳng lên hộp trục chính để tránh việc phải khóa trục chính. | ||
| Đối tượng | G15 | |
| Kiểm độ song song giữa trục của lỗ lắp dụng cụ của ụ rơvonve và chuyển động theo phương trục X a) trong mặt phẳng ZX, b) trong mặt phẳng YZ. CHÚ THÍCH: Phép kiểm này áp dụng cho các lỗ lắp dụng cụ của ụ rơvonve song song với chuyển động theo phương X. | ||
| Sơ đồ
CHÚ DẪN: L chiều dài đo | ||
| Dung sai a) và b): 0,02 đối với L = 100 | Sai lệch đo được | |
| Dụng cụ đo Trục kiểm và cảm biến dịch chuyển thẳng | ||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996), 5.4.2.2.3 Lặp lại phép kiểm cho tất cả các lỗ lắp dụng cụ trên ụ rơvonve. Gắn trục kiểm vào lỗ lắp dụng cụ của ụ rơvonve và gắn cảm biến dịch chuyển thẳng trên trục chính mang phôi sao cho đầu dò của nó chạm vào trục kiểm trong mặt phẳng ZX/XY. Tốt hơn là gắn cảm biến dịch chuyển thẳng lên hộp trục chính để tránh việc phải khóa trục chính. | ||
5.4.3. Ụ dụng cụ cho các dụng cụ được dẫn động công suất
| Đối tượng | G16 | |||
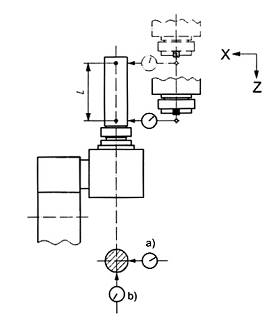
| Kiểm độ đảo và độ đảo hướng kính (hoặc mặt đầu) của (các) trục chính mang dụng cụ, lỗ trục chính và mặt đầu. 1) Độ đảo của lỗ côn trong a) tại đầu mút trục chính; b) tại vị trí cách đầu mút trục chính 100 mm. 2) Lỗ trục chính hình trụ: a) Độ đảo của đầu mút trục chính; b) Độ đảo hướng kính (hoặc mặt đầu) của bề mặt trục chính mang dụng cụ. | ||||
| Sơ đồ
| ||||
| Dung sai | Sai lệch đo được | |||
| 1) a): | 0,010 | b) 0,015 |
| |
| 2) a) và b): | 0,010 |
|
| |
| Dụng cụ đo 1) Trục kiểm và cảm biến dịch chuyển thẳng 2) Cảm biến dịch chuyển thẳng | ||||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996), 5.6.1.2.3, 5.6.3.2 Các phép đo phải được thực hiện cho tất cả các trục chính mang dụng cụ. Trường hợp 1) lặp lại các phép đo ít nhất bốn lần, trục kiểm quay đi 90° so với trục chính. Ghi lại giá trị trung bình của các giá trị đọc. Cần thực hiện theo các bước để giảm tối thiểu ảnh hưởng của lực cản tiếp tuyến trên đầu đo của dụng cụ đo. Phép kiểm 2) b) thực hiện tại vị trí bán kính lớn nhất có thể. | ||||
| Đối tượng | G17 | |
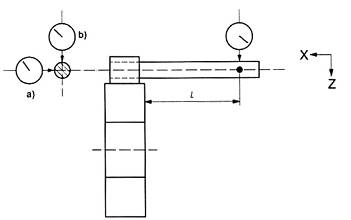
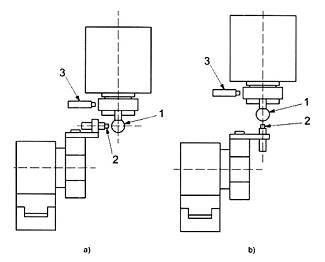
| Kiểm độ song song giữa đường tâm trục chính mang dụng cụ và chuyển động theo phương trục Z a) trong mặt phẳng ZX, b) trong mặt phẳng YZ. CHÚ THÍCH: Phép kiểm này áp dụng cho tất cả các trục chính của ụ rơvonve có khả năng quay, song song với trục Z | ||
| Sơ đồ
CHÚ DẪN: L Chiều dài đo | ||
| Dung sai Với a) và b): 0,02 đối với L = 100 | Sai lệch đo được | |
| Dụng cụ đo Trục kiểm và cảm biến dịch chuyển thẳng | ||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996), 5.4.1.2.1, 5.4.2.2.3 Quay trục chính mang dụng cụ để tìm vị trí độ đảo trung bình, sau đó di chuyển trục chính mang phôi theo phương Z. Ghi lại hiệu số lớn nhất của các giá trị đọc. Cách khác, lấy các giá trị đọc dọc theo trục kiểm tại một góc quay, sau đó quay trục chính đi 180° và tiếp tục lấy các giá trị đo tại các vị trí tương ứng trước đó. Hiệu số lớn nhất giữa hai giá trị đo trung bình chính là sai lệch độ song song. Tốt hơn là gắn cảm biến dịch chuyển thẳng lên hộp trục chính để tránh việc phải khóa trục chính. Các phép kiểm tương ứng phải được áp dụng cho các trục chính ụ rơvonve có khả năng quay, mà song song với trục Y hoặc trục X. | ||
5.4.4. Độ chính xác và khả năng lặp lại của ụ rơvonve phân độ
| Đối tượng | G18 | ||||
| a) Kiểm khả năng lặp lại của ụ rơvonve phân độ (mặt phẳng XY); b) Kiểm khả năng lặp lại của chuyển động ụ rơvonve theo phương hướng kính (mặt phẳng ZX). | |||||
| Sơ đồ
CHÚ DẪN: L Chiều dài đo | |||||
| Dung sai | Sai lệch đo được | ||||
|
| Loại 1 | Loại 2 | Loại 3 | ||
|
| L = 50 | L = 100 | L = 100 | ||
| a) và b): | 0,005 | 0,010 | 0,015 | ||
| Dụng cụ đo Trục kiểm và cảm biến dịch chuyển thẳng | |||||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996) 6.4.2 Đo tại khoảng cách L kể từ mặt của ụ rơvonve hoặc mặt lắp dụng cụ. Với ụ rơvonve ở giữa hành trình, đặt vị trí các cảm biến dịch chuyển thẳng sao cho chúng tiếp xúc với trục kiểm tại các vị trí đo 0° và 90°. Ghi lại vị trí phân độ của ụ rơvonve, vị trí trục và các giá trị đọc của cảm biến dịch chuyển thẳng. Di chuyển các dụng cụ đo ra xa trục kiểm với đường trục song song với đường trục của trục kiểm, sau đó phân độ ụ rơvonve đi 360° và định lại vị trí các dụng cụ đo tới các vị trí cần đo theo một chu trình tự động. Ghi lại các giá trị đọc của cảm biến dịch chuyển thẳng. Lặp lại quy trình trên ba lần, với cảm biến dịch chuyển thẳng phải được chỉnh về giá trị không tại thời điểm bắt đầu của mỗi phép kiểm. Sai lệch là hiệu số lớn nhất giữa ba bộ số liệu đo. Tốt hơn là gắn cảm biến dịch chuyển thẳng lên hộp trục chính để tránh việc phải khóa trục chính. Phép kiểm phải được lặp lại tại ít nhất ba hướng khác nhau của ụ rơvonve, và cảm biến dịch chuyển thẳng phải được chỉnh về không tại mỗi vị trí. CHÚ THÍCH: Khả năng lặp lại định vị của các trục tịnh tiến (được sử dụng để đưa về không cảm biến dịch chuyển thẳng) có thể ảnh hưởng đến các kết quả đo. | |||||
| Đối tượng | G19 | ||
| Kiểm độ chính xác của ụ rơvonve phân độ | |||
| Sơ đồ
| |||
| Dung sai | Sai lệch đo được | ||
| Loại 1 | Loại 2 và 3 | ||
| 0,03 | 0,04 | ||
| Dụng cụ đo Cảm biến dịch chuyển thẳng | |||
| Xem và viện dẫn TCVN 7011-1 (ISO 230-1) Định vị trí đầu dò của cảm biến dịch chuyển thẳng tại các vị trí a), b) và c) sao cho chúng tiếp xúc với các lỗ hoặc các rãnh chuẩn của ụ rơvonve. Ghi lại vị trí của trục của ụ rơvonve. Ghi lại các giá trị đọc của cảm biến dịch chuyển thẳng. Nếu sử dụng mặt chuẩn của ụ rơvonve, cảm biến dịch chuyển thẳng phải được đặt ở vị trí f) thay cho đặt ở vị trí c). Để phân độ ụ rơvonve, tách dụng cụ đo khỏi các bề mặt đo của ụ rơvonve bằng một đoạn dịch chuyển thẳng thích hợp, phân độ ụ rơvonve tới vị trí tiếp theo, đưa các dụng cụ đo trở lại vị trí đo trước đó. Hiệu số lớn nhất của tất cả các giá trị đọc của cảm biến dịch chuyển thẳng chính là độ chính xác ụ rơvonve phân độ. Lặp lại phép kiểm ba lần cho mỗi vị trí của ụ rơvonve, lấy trung bình của các giá trị đọc trên cảm biến ở mỗi vị trí để giảm tối thiểu ảnh hưởng của khả năng lặp lại của ụ rơvonve. Hiệu số lớn nhất của tất cả các giá trị đọc trung bình của cảm biến dịch chuyển thẳng là độ chính xác phân độ ụ rơvonve. CHÚ THÍCH: Vị trí a) cũng bị ảnh hưởng bởi dịch chuyển theo chiều trục của ụ rơvonve phân độ, trong khi vị trí b) cũng bị ảnh hưởng của khả năng lặp lại của ụ rơvonve phân độ, vị trí c) cũng bị ảnh hưởng của chuyển động hướng kính của ụ rơvonve phân độ và vị trí f) chịu ảnh hưởng của dịch chuyển hướng kính. Nếu ụ rơvonve có một chức năng định vị thì thực hiện phép đo ở vị trí b) trên mặt bên định vị, không phải tại khe hở kẹp của lỗ định vị. | |||
5.5. Ụ trục chính mang phôi xoay
| Đối tượng | G20 | |||
| Kiểm độ song song giữa mặt phẳng xoay của đường trục ụ trục chính mang phôi (trục B’) và mặt phẳng ZX. | ||||
| Sơ đồ
| ||||
| Dung sai | Sai lệch đo được | |||
| Góc xoay: | ± 30o | ± 60o |
| |
| Tại bán kính 300 | 0,01 | 0,02 |
| |
| Dụng cụ đo Cảm biến dịch chuyển thẳng và trục kiểm | ||||
| Xem và viện dẫn TCVN 7011-1:2007 (ISO 230-1:1996), 5.4.3.2 Gá trục kiểm vào đầu ụ rơvonve. Cho đầu đo của cảm biến dịch chuyển thẳng tiếp xúc với trục kiểm tại vị trí cách trục quay B’ khoảng 300 mm, sau đó di chuyển phần đầu của trục chính mang phôi tới các vị trí + 30° (và + 60°) và cho đầu đo của cảm biến tiếp xúc lại với trục kiểm tại cùng các vị trí trước. Phân độ ụ trước trục chính mang phôi tới các vị trí - 30° (và - 60°) và kiểm tra độ cao của trục kiểm tại cùng các vị trí trên trục kiểm. Lặp lại phép kiểm ít nhất ba lần. Hiệu số lớn nhất của các giá trị đọc là sai lệch độ song song. | ||||
6. Phép kiểm độ chính xác của các trục quay
6.1. Độ chính xác quay của trục chính mang phôi
| Đối tượng | R1 | ||||||
| Kiểm độ chính xác trục quay của trục chính mang phôi: a) chuyển động có sai số hướng kính của trục chính, EXC; b) chuyển động có sai số hướng trục của trục chính, EZC. | |||||||
| Sơ đồ
CHÚ DẪN: 1 mẫu giả chuẩn (bi kiểm) 2 cảm biến dịch chuyển 3 dụng cụ đo góc (hoặc cảm biến trigơ) | |||||||
| Dung sai | Sai lệch đo được | ||||||
|
| Theo phần trăm | Theo phần trăm | |||||
|
| 10 % | 50 % | 100 % | 10 % | 50 % | 100 % | |
| a) Giá trị chuyển động có b) Giá trị chuyển động có Nếu tốc độ quay nhỏ nhất lớn hơn 10 % tốc độ quay lớn nhất thì trục chính phải được vận hành ở tốc độ nhỏ nhất. Nếu nhà cung cấp/nhà sản xuất quyết định theo một thỏa thuận để đưa các phép kiểm này vào trong hợp đồng quy trình nghiệm thu máy thì nhà cung cấp/nhà sản xuất cũng phải mô tả, bằng thỏa thuận, các dung sai tương ứng. CHÚ THÍCH: Dung sai cho phép kiểm này có thể được cho trong phiên bản sau của tiêu chuẩn này, tùy thuộc vào kết quả có được từ phép đo hiệu suất của trục chính trong điều kiện sản xuất công nghiệp. | a) b) | ||||||
| Dụng cụ đo Bi cầu chính xác, các cảm biến dịch chuyển thẳng không tiếp xúc và các dụng cụ đo góc Phương pháp khác, bi cầu chính xác được đặt hơi lệch tâm với đường trục trung bình của trục chính và các cảm biến dịch chuyển thẳng không tiếp xúc | |||||||
| Xem và viện dẫn TCVN 7011-7 (ISO 230-7) Phép kiểm này áp dụng cho trục chính với hướng cảm biến cố định theo 5.5, TCVN 7011-7:2013 (ISO 230-7:2006). Sau khi thiết lập dụng cụ đo, trừ khi có một thỏa thuận khác giữa nhà sản xuất/nhà cung cấp và người sử dụng, trục chính được làm nóng tại tốc độ bằng 50 % tốc độ quay lớn nhất trong khoảng thời gian là 10 min. Chuyển động có sai số hướng kính tổng và giá trị chuyển động có sai số hướng kính tổng được định nghĩa lần lượt trong 3.2.4 và 3.5.1 của TCVN 7011-7:2013 (ISO 230-7:2006). a) Chuyển động có sai số hướng kính tổng (EXC) Thực hiện phép đo chuyển động có sai số hướng kính theo 5.4.2 của TCVN 7011-7:2013 (ISO 230-7:2006). Chuyển động có sai số hướng kính phải được đo tại vị trí gần nhất có thể so với đầu mút của trục chính. Với chuyển động có sai số hướng kính, EXC, phải đưa ra một đồ thị cực chuyển động có sai số tổng (xem 3.3.1, TCVN 7011-7:2013 (ISO 230-7:2006)) với tâm đường tròn xác định theo phương pháp bình phương nhỏ nhất (3.4.3, TCVN 7011-7:2013 (ISO 230-7:2006)). b) Chuyển động có sai số hướng trục tổng (EZC) Thực hiện phép đo chuyển động có sai số hướng trục tổng theo 5.4.4 của TCVN 7011-7:2013 (ISO 230-7:2006). Với chuyển động có sai số hướng trục EZC, phải đưa ra một đồ thị cực của chuyển động có sai số tổng (3.3.1, TCVN 7011-7:2013 (ISO 230-7:2006)) với một tâm biểu đồ cực (PC) (3.4.1, TCVN 7011-7:2013 (ISO 230-7:2006)). Đối với các phép kiểm này phải cung cấp các thông số sau: - Các vị trí hướng kính, hướng trục hoặc bề mặt tại đó thực hiện các phép đo; - Sự nhận dạng tất cả các mẫu giả, bia và đồ gá sử dụng; - Vị trí thiết lập đo; - Vị trí của các bộ phận định vị trí quay hoặc tịnh tiến kết nối với thiết bị khi kiểm; - Góc chỉ phương của hướng cảm biến, ví dụ, các góc theo chiều trục, góc hướng kính hoặc trung gian, thích hợp; - Biểu diễn các kết quả đo, ví dụ: giá trị chuyển động có sai số, đồ thị cực, đồ thị theo thời gian, đồ thị phổ tần suất; - Tốc độ quay của trục chính (bằng 0 đối với chuyển động có sai số tĩnh); - Khoảng thời gian tính bằng giây hoặc số vòng quay của trục chính; - Quy trình làm nóng máy hoặc dừng máy phù hợp; - Đáp ứng tần số của thiết bị đo, tính bằng héc hoặc số chu kỳ trên mỗi vòng quay, bao gồm các đặc tính đầu ra của các mạch lọc điện tử. Trong trường hợp thiết bị đo kỹ thuật số, độ phân giải dịch chuyển và tốc độ lấy mẫu; - Vòng cấu trúc, bao gồm vị trí và hướng của các cảm biến so với hộp trục chính mà từ đó chuyển động có sai số được thông báo, các đối tượng cụ thể mà theo đó các đường trục của trục chính và các trục tọa độ chuẩn được định vị và các bộ phận kết nối các đối tượng này; - Thời gian và ngày đo; - Kiểu và tính trạng hiệu chuẩn của tất cả các thiết bị đo; - Các điều kiện vận hành khác có thể ảnh hưởng đến phép đo như nhiệt độ môi trường. Phép kiểm này có thể được thực hiện với phương pháp đo ba điểm được mô tả trong Phụ lục A. | |||||||
6.2. Độ chính xác quay của trục chính mang dụng cụ
| Đối tượng | R2 | ||||||
| Kiểm độ chính xác trục quay của trục chính mang dụng cụ: a) chuyển động có sai số hướng kính của trục chính mang dụng cụ, ERA; b) chuyển động có sai số hướng trục của trục chính mang dụng cụ, EXA. | |||||||
| Sơ đồ
CHÚ DẪN: 1 mẫu giả chuẩn (bi kiểm) 2 cảm biến dịch chuyển 3 dụng cụ đo góc (hoặc cảm biến trigơ) | |||||||
| Dung sai | Sai lệch đo được | ||||||
|
| Theo phần trăm | Theo phần trăm | |||||
|
| 10 % | 50 % | 100 % | 10 % | 50 % | 100 % | |
| a) Giá trị chuyển động có sai số b) Giá trị chuyển động có sai số Nếu tốc độ quay nhỏ nhất lớn hơn 10 % tốc độ quay lớn nhất thì trục chính phải được vận hành ở tốc độ quay nhỏ nhất. Nếu nhà cung cấp/nhà sản xuất quyết định theo một thỏa thuận để đưa các phép kiểm này vào trong hợp đồng quy trình nghiệm thu máy thì nhà cung cấp/nhà sản xuất cũng phải mô tả, bằng thỏa thuận, các dung sai tương ứng. CHÚ THÍCH: Dung sai cho phép kiểm này có thể được cho trong phiên bản sau của tiêu chuẩn này, tùy thuộc vào kết quả có được từ phép đo hiệu suất của trục chính trong điều kiện sản xuất công nghiệp. | a) b) | ||||||
| Dụng cụ đo Bi cầu chính xác, các cảm biến dịch chuyển thẳng không tiếp xúc và các dụng cụ đo góc Phương pháp khác, bi cầu chính xác được đặt hơi lệch tâm với đường trục trung bình của trục chính và các cảm biến dịch chuyển thẳng không tiếp xúc | |||||||
| Xem và viện dẫn TCVN 7011-7 (ISO 230-7) Phép kiểm này là một phép kiểm tra trục chính với hướng cảm biến quay theo 5.4 của TCVN 7011-7:2013 (ISO 230-7:2006). Sau khi thiết lập dụng cụ đo, trừ khi có thỏa thuận khác giữa nhà sản xuất/nhà cung cấp và người sử dụng, trục chính được làm nóng tại tốc độ bằng 50 % tốc độ quay lớn nhất trong khoảng thời gian là 10 min. Chuyển động có sai số hướng kính tổng và giá trị giá trị chuyển động có sai số hướng kính tổng được định nghĩa lần lượt trong 3.2.4 và 3.5.1 của TCVN 7011-7:2013 (ISO 230-7:2006). a) Chuyển động có sai số hướng kính tổng (ERA) Thực hiện phép đo chuyển động có sai số hướng kính theo 5.4.2 của TCVN 7011-7:2013 (ISO 230-7:2006). Chuyển động có sai số hướng kính phải được đo tại vị trí gần nhất có thể so với đầu mút của trục chính. Với chuyển động có sai số hướng kính, ERA, phải đưa ra một đồ thị cực chuyển động có sai số tổng (3.3.1, TCVN 7011-7:2013 (ISO 230-7:2006)) với tâm đường tròn xác định theo phương pháp bình phương nhỏ nhất (3.4.3, TCVN 7011-7:2013 (ISO 230-7:2006)). b) Chuyển động có sai số hướng trục tổng (EXA) Phép đo chuyển động có sai số hướng trục tổng được mô tả trong 5.4.4 của TCVN 7011-7:2013 (ISO 230-7:2006) Với chuyển động có sai số hướng trục EXA, phải đưa ra một đồ thị cực của chuyển động có sai số tổng (3.3.1, TCVN 7011-7:2013 (ISO 230-7:2006)) với một tâm biểu đồ cực (PC) (3.4.1, TCVN 7011-7:2013 (ISO 230-7:2006)). Đối với các phép kiểm này phải cung cấp các thông số sau: - Các vị trí hướng kính, hướng trục hoặc bề mặt tại đó thực hiện các phép đo; - Sự nhận dạng tất cả các mẫu giả, bia và đồ gá sử dụng; - Vị trí thiết lập đo; - Vị trí của các bộ phận định vị trí quay hoặc tịnh tiến kết nối với thiết bị khi kiểm; - Góc chỉ phương của hướng cảm biến, ví dụ, các góc theo chiều trục, góc hướng kính hoặc trung gian, thích hợp; - Biểu diễn các kết quả đo, ví dụ: giá trị chuyển động có sai số, đồ thị cực, đồ thị theo thời gian, đồ thị phổ tần suất; - Tốc độ quay của trục chính (bằng 0 đối với chuyển động có sai số tĩnh); - Khoảng thời gian tính bằng giây hoặc số vòng quay của trục chính; - Quy trình làm nóng máy hoặc dừng máy phù hợp; - Đáp ứng tần số của thiết bị đo, tính bằng héc hoặc số chu kỳ trên mỗi vòng quay, bao gồm các đặc tính đầu ra của các mạch lọc điện tử. Trong trường hợp thiết bị đo kỹ thuật số, độ phân giải dịch chuyển và tốc độ lấy mẫu; - Vòng cấu trúc, bao gồm vị trí và hướng của các cảm biến so với hộp trục chính mà từ đó chuyển động có sai số được thông báo, các đối tượng cụ thể mà theo đó các đường trục của trục chính và các trục tọa độ chuẩn được định vị và các bộ phận kết nối các đối tượng này; - Thời gian và ngày đo; - Kiểu và tính trạng hiệu chuẩn của tất cả các thiết bị đo; - Các điều kiện vận hành khác có thể ảnh hưởng đến phép đo như nhiệt độ môi trường. | |||||||
Phụ lục A
(Tham khảo)
Phương pháp đo ba điểm
Sự biến đổi độ tròn của mẫu giả được sử dụng trong phép đo trục của sai số quay ảnh hưởng đến các kết quả đo. Phương pháp dưới đây sử dụng ba cảm biến dịch chuyển thẳng bố trí hướng kinh quanh một mẫu giả “không lý tưởng” là một phương pháp để loại bỏ ảnh hưởng của sự biến đổi về độ tròn của mẫu giả tới các phép đo trục của chuyển động quay tròn.
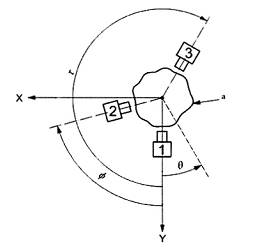
CHÚ DẪN:
1, 2, 3 Các cảm biến
q Góc đo từ trục Y
t Góc giữa cảm biến 1 và cảm biến 3
f Góc giữa cảm biến 1 và cảm biến 2
a Biên dạng tròn
Hình A.1 - Phương pháp đo ba điểm
Trên Hình A.1, góc giữa hai cảm biến 1 và 2 là f, và góc giữa hai cảm biến 1 và 3 và t. Góc được đo từ trục Y là q. Biên dạng tròn của mẫu giả chuẩn (thanh kiểm) là r(q), x(q) và y(q) là chuyển động có sai số hướng kính theo các phương X và Y. Tín hiệu ra của ba cảm biến này được đưa ra bởi hệ phương trình (A.1).
 (A.1)
(A.1)
Sau khi nhân các tín hiệu ra của cảm biến 1, 2 và 3 với các hệ số “1, p, q”, rồi cộng các phương trình với nhau ta được S(q).
S(q) = S1(q) + pS2(q) + qS3(q) (A.2)
= r(q) + pr(q + f) + qr(q + t) + (1 + pcosf + qcost) x (q) + (psinf + qsint)y(q)
 (A.3)
(A.3)
Nếu p, q, f, t được chọn thỏa mãn Biểu thức (A.3) thì Phương trình (A.2) sẽ độc lập với chuyển động có sai số x(q) và y(q). Biên dạng tròn của mẫu giả chuẩn r(q) được biểu diễn như sau:
 (A.4)
(A.4)
Do đó, S(q) được cho bởi
 (A.5)
(A.5)
 (A.6)
(A.6)
Thay ak, bk từ các phương trình (A.6), các hệ số Fourier của S(q), là Fk, Gk, được tính bởi các công thức (A.7)
 (A.7)
(A.7)
Khi đó, các hệ số Fourier của biên dạng tròn của mẫu giả chuẩn, Ak, Bk, thu được như sau:
 (A.8)
(A.8)
Khi đó, chuyển động có sai số hướng kính theo phương X và Y được tính theo công thức dưới đây. Trong đó ![]() là biên dạng tròn ước lượng được của mẫu giả chuẩn.
là biên dạng tròn ước lượng được của mẫu giả chuẩn.
 (A.9)
(A.9)
THƯ MỤC TÀI LIỆU THAM KHẢO
[1] ISO 841:2001, Industrial automation systems and integration - Numerical control of machines - Coordinate system and motion nomenclature (Hệ thống tự động công nghiệp và tích hợp - Máy điều khiển số - Hệ thống tọa độ và danh mục các chuyển động)
[2] ISO 1708:1989, Acceptance conditions for general purpose parallel lathes - Testing of the accuracy (Điều kiện nghiệm thu máy tiện song song thông dụng - Kiểm độ chính xác)
[3] ISO 2806:1994, Industrial automation systems - Numerical control of machines - Vocabulary (Hệ thống tự động công nghiệp - Điều khiển số của máy - Từ vựng)
[4] TCVN 4279-1:2008 (ISO 3442-1:2005) Máy công cụ - Kích thước và kiểm hình học cho mâm cặp tự định tâm có chấu cặp - Phần 1: Mâm cặp vận hành bằng tay có chấu dạng rãnh và then
[5] TCVN 4279-2:2008 (ISO 3442-2:2005) Máy công cụ - Kích thước và kiểm hình học cho mâm cặp tự định tâm có chấu cặp - Phần 2: Mâm cặp vận hành bằng máy có chấu dạng rãnh và then
[6] ISO 6155:1998, Machine tools - Test conditions for horizontal spindle turret and single spindle automatic lathes - Testing of the accuracy (Máy công cụ - Điều kiện kiểm máy tiện rơvonve trục chính nằm ngang và máy tiện tự động trục chính đơn - Kiểm độ chính xác)
[7] TCVN 7681-1:2013 (ISO 13041-1:2004), Điều kiện kiểm máy tiện điều khiển số và trung tâm tiện - Phần 1: Kiểm hình học cho các máy có một trục chính mang phôi nằm ngang
[8] SHINO, H., MITSUI, K., TATSUE, Y., TANAKA, N., OMINO, T., TABATA, T., NAKAYAMA, K. A new method for evaluating error motion of ultra precision spindle. Ann. CIRP, 1987, 36, pp.381-384
[9] MITSUI, K. Development of a new measuring method for spindle rotation accuracy by three points method. In: DAVIES, B.J., editor. Proceeding of the 23rd International Machine Tool Design and Reseach Conference, Manchester 1982-09-14 to 15, pp.115-121. UMIST, Manchester
[10] DAVIES, B.J., editor. Proceedings of the 23rd International Machine Toot Design and Reseach Conference, Manchester 1982-09-14 to 15, pp.115-121. UMIST, Manchester
Bạn chưa Đăng nhập thành viên.
Đây là tiện ích dành cho tài khoản thành viên. Vui lòng Đăng nhập để xem chi tiết. Nếu chưa có tài khoản, vui lòng Đăng ký tại đây!
