- Tổng quan
- Nội dung
- Tiêu chuẩn liên quan
- Lược đồ
- Tải về
Tiêu chuẩn TCVN 7059:2009 Phương pháp đo mô men quán tính mô tô
| Số hiệu: | TCVN 7059:2009 | Loại văn bản: | Tiêu chuẩn Việt Nam |
| Cơ quan ban hành: | Bộ Khoa học và Công nghệ | Lĩnh vực: | Giao thông |
|
Ngày ban hành:
Ngày ban hành là ngày, tháng, năm văn bản được thông qua hoặc ký ban hành.
|
2009 |
Hiệu lực:
|
Đã biết
|
| Người ký: | Đang cập nhật |
Tình trạng hiệu lực:
Cho biết trạng thái hiệu lực của văn bản đang tra cứu: Chưa áp dụng, Còn hiệu lực, Hết hiệu lực, Hết hiệu lực 1 phần; Đã sửa đổi, Đính chính hay Không còn phù hợp,...
|
Đã biết
|
TÓM TẮT TIÊU CHUẨN VIỆT NAM TCVN 7059:2009
Nội dung tóm tắt đang được cập nhật, Quý khách vui lòng quay lại sau!
Tải tiêu chuẩn Việt Nam TCVN 7059:2009
 Tiêu chuẩn Việt Nam TCVN 7059:2009 PDF (Bản có dấu đỏ)
Tiêu chuẩn Việt Nam TCVN 7059:2009 PDF (Bản có dấu đỏ) Tiêu chuẩn Việt Nam TCVN 7059:2009 DOC (Bản Word)
Tiêu chuẩn Việt Nam TCVN 7059:2009 DOC (Bản Word)TIÊU CHUẨN QUỐC GIA
TCVN 7059:2009
ISO 9129:2008
MÔ TÔ - PHƯƠNG PHÁP ĐO MÔ MEN QUÁN TÍNH
Motorcycles - Measurement methods for moments of inertia
Lời nói đầu
TCVN 7059 : 2009 thay thế TCVN 7059 : 2002;
TCVN 7059 : 2009 hoàn toàn tương đương với ISO 9129 : 2008;
TCVN 7059 : 2009 do Ban kỹ thuật tiêu chuẩn quốc gia TCVN/TC 22 Phương tiện giao thông đường bộ biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công nghệ công bố.
Lời giới thiệu
Tính ổn định của mô tô là yếu tố quan trọng cho sự vận hành an toàn của mô tô. Tổ hợp mô tô/người lái và môi trường sử dụng tạo thành một hệ thống nhất. Tuy nhiên việc đánh giá tính ổn định của tổ hợp mô tô / người lái rất phức tạp do sự tác động qua lại của tính ổn định của mô tô, ảnh hưởng của tư thế người lái và sự phản ứng của người lái đối với các điều kiện thay đổi liên tục.
Trong đánh giá tính ổn định của mô tô, việc xác định các đặc tính động học của tổ hợp mô tô/ người lái xe được xem là một phần quan trọng của các thông số thiết kế của bản thân phương tiện.
Tiêu chuẩn này mô tả phương pháp đo để xác định mô men quán tính của mô tô và của tổ hợp mô tô / người lái.
MÔ TÔ - PHƯƠNG PHÁP ĐO MÔ MEN QUÁN TÍNH
Motorcycles - Measurement methods for moments of inertia
1. Phạm vi áp dụng
Tiêu chuẩn này quy định phương pháp đo để xác định mô men quán tính của mô tô và của tổ hợp mô tô/ người lái. Tiêu chuẩn này áp dụng cho mô tô hai bánh.
Có thể dùng các phương pháp đo khác nếu chứng minh được các kết quả là tương đương với nhau.
Không thể chỉ dùng các kết quả đo thu được theo phương pháp đo của tiêu chuẩn này để đánh giá tính ổn định của mô tô bởi vì các kết quả đo này chỉ đề cập đến một khía cạnh của hiện tượng rất phức tạp.
2. Tài liệu viện dẫn
Các tài liệu viện dẫn sau rất cần thiết cho việc áp dụng tiêu chuẩn này. Đối với các tài liệu viện dẫn ghi năm công bố thì áp dụng phiên bản được nêu. Đối với các tài liệu viện dẫn không ghi năm công bố thì áp dụng phiên bản mới nhất, bao gồm cả các sửa đổi (nếu có).
TCVN 6578 (ISO 3779) Phương tiện giao thông đường bộ - Mã nhận dạng phương tiện giao thông (VIN) - Nội dung và cấu trúc.
TCVN 7060 (ISO 9130) Phương tiện giao thông đường bộ - Mô tô - Phương pháp đo xác định vị trí trọng tâm.
49 CFR Part 572 Subpart B [ Code of Federal Regulations, issued by the National Highway Traffic Safety Administration (NHTSA)] (Luật Liên bang do cơ quan quản lý an toàn giao thông trên đường cao tốc quốc gia ban hành).
3. Thuật ngữ và định nghĩa
Tiêu chuẩn này áp dụng các thuật ngữ và định nghĩa sau.
3.1. Hệ thống trục mô tô (x, y, z) (motorcycle - fixed axis system (x, y, z))
Hệ thống trục tọa độ vuông góc được đặt cố định vào mô tô sao cho khi mô tô chuyển động theo đường thẳng trên đường bằng thì trục x là trục nằm ngang trong mặt phẳng trung tuyến dọc của mô tô và hướng về phía trước. Trục y hướng về phía bên trái người lái và trục z hướng lên phía trên.
CHÚ THÍCH 1: hệ thống trục tọa độ này chuyển động tịnh tiến và quay cùng với mô tô.
CHÚ THÍCH 2: Coi như mô tô được cố định trên một bệ đo và hệ thống trục tọa độ được đặt vào bệ đo đó.
3.2. Hệ thống trục mặt đất (X, Y, Z) (earth - fixed axis system (X, Y, Z))
Một hệ trục tọa độ vuông góc được đặt cố định trên mặt đất. Trục X và Y nằm trong mặt phẳng ngang và trục Z hướng lên trên.
4. Điều kiện đo
4.1. Điều kiện đo cho mô tô như sau:
a) mô tô phải đảm bảo sạch sẽ, không bám bùn đất, không bị biến dạng và hoạt động bình thường
b) nhiên liệu phải được đổ đầy theo quy định của nhà sản xuất;
c) dầu bôi trơn, nước làm mát (trong trường hợp động cơ làm mát bằng nước) phải được đổ đầy theo quy định của nhà sản xuất;
d) áp suất lốp theo quy định của nhà sản xuất;
e) dụng cụ đi kèm với mô tô phải được đặt đúng vị trí quy định;
f) hệ thống treo trước và treo sau phải được cố định ở vị trí tĩnh;
g) bánh trước được đặt dọc theo trục x.
Những điều kiện trên có thể sửa đổi theo đối tượng đo, những điều kiện được sửa đổi phải được ghi lại trong báo cáo kết quả đo (xem Phụ lục A).
4.2. Điều kiện đo khi người lái ngồi trên mô tô:
a) điều kiện đo đối với mô tô được qui định trong 4.1;
b) người nộm được qui định trong 49 CFR part 572 Subpart B (hoặc tương đương) có khối lượng 73,4 kg hoặc bằng khối lượng của người lái;
c) người lái phải ở vị trí như sau:
1) ở vị trí trong mặt phẳng trung tuyến dọc của mô tô;
2) ngồi trên yên xe, hai tay nắm tay lái, hai chân đặt trên bàn để chân;
3) tạo một góc tạo bởi đường nối điểm S (chỉ ra tâm quay của phần thân và cánh tay của người lái) và điểm H (chỉ ra tâm quay của phần thân và đùi của người lái) và trục x.
4) ở vị trí ngồi đó là khoảng cách giữa trục trước và điểm H dọc theo trục x.
Nếu những điều kiện trên sửa đổi theo đối tượng đo, thì những điều kiện được sửa đổi phải được ghi lại trong báo cáo kết quả đo (xem Phụ lục A).
5. Thiết bị đo
Thiết bị đo mô men quán tính phải như qui định sau đây hoặc có tính năng và độ chính xác tương đương:
a) Thước vuông chính xác có thể đo được đến 0,1 mm/1 m (≈ 20 inch);
b) Thước dây bằng thép có dung sai ± [0,3 + 0,1 (L-1)] mm với chiều dài L tính bằng mét;
c) Cân bàn có độ chính xác 0,1 kg;
d) Đồng hồ bấm giây có thể đo 0,01 s, được sử dụng để đo thời gian dao động.
e) Bệ đo vững chắc và có khối lượng nhẹ;
f) Mũi của dao đo có bán kính cong của đỉnh mũi dao nhỏ hơn 1 mm và góc tạo bởi hai mặt bên của mũi dao nhỏ hơn 90 o.
CHÚ THÍCH: Trong quá trình sử dụng thì đỉnh của mũi dao đo sẽ bị mài mòn.
g) Quả cân để làm nghiêng bệ đo.
6. Quy trình đo
6.1. Đo vị trí trọng tâm
Tính toán khối lượng và vị trí trọng tâm của bệ đo, mô tô và của bệ đo khi đặt mô tô lên trên theo tiêu chuẩn TCVN 7060 (ISO 9130)).
6.2. Mô men quán tính quanh trục x (nguyên lý con lắc vật lý)
6.2.1. Mô men quán tính quay quanh trục AB của bệ đo.
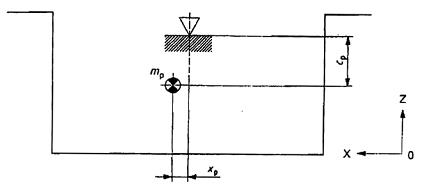
Mô men quán tính với trục AB của bệ đo sẽ được đo theo quy trình dưới đây (Hình 1).
a) Đặt mũi dao đo A và B trên giá sao cho chúng có thể dao động tự do quanh trục AB.
b) Cho bệ đo dao động nhẹ quanh trục AB. Cố gắng giữ tổng góc dao động nhỏ hơn 5o.
c) Để bệ đo dao động một cách ổn định và đo thời gian cần thiết để bệ đo dao động 50 lần bằng đồng hồ bấm giây. Lặp lại quy trình này ba lần lấy giá trị trung bình của ba lần đo. Kết quả trung bình được tính là chu kỳ dao động.
d) Tính mô men quán tính của bệ đo đối với trục AB, Ixp, tính bằng kgm2 theo công thức (1):
Ixp = (![]() mpg
mpg
Trong đó:
Txp là chu kỳ dao động của bệ đo quanh trục AB, tính bằng s;
cp là khoảng cách dọc theo trục z từ mũi dao đến trọng tâm của bệ đo, tính bằng m;
yp là khoảng cách dọc theo trục y từ mũi dao đến trọng tâm của bệ đo, tính bằng m;
mp là khối lượng của bệ đo, tính bằng kg;
g là gia tốc trọng trường (9,81 m/s2).
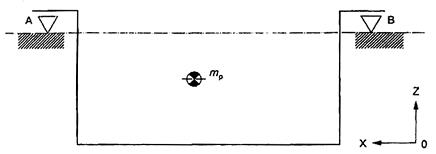
a) nhìn từ phía bên
b) nhìn từ phía sau
CHÚ DẪN:
cp Khoảng cách dọc theo trục z từ mũi dao đo đến trọng tâm của bệ đo
mp Khối lượng của bệ đo
yp Khoảng cách dọc theo trục y từ mũi dao đo đến trọng tâm của bệ đo
6.2.2. Mô men quán tính quay quanh trục x của mô tô
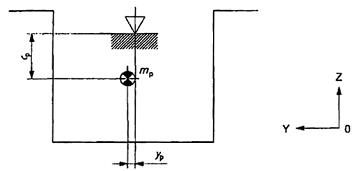
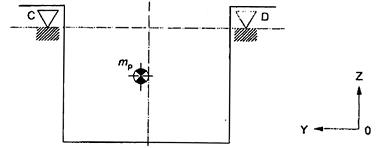
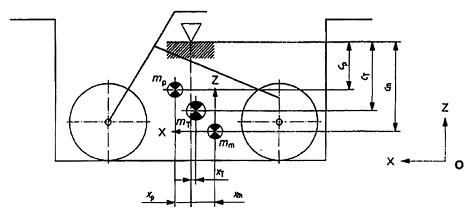
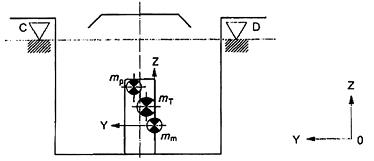
Mô men quán tính lắc quanh trục x của mô tô được đo theo trình tự sau (Hình 2)
CHÚ THÍCH: cách đo này áp dụng cho cả mô tô không người lái và mô tô có người lái.
a) Đặt mô tô trên bệ đo và cố định nó sao cho mô tô không dịch chuyển. Góc nghiêng ngang của mô tô đối với bệ đo phải nằm trong khoảng 0o ± 0,5o.
b) Đặt mũi dao đo A và B trên giá sao cho chúng có thể dao động tự do quanh trục AB.
c) Cho bệ đo dao động nhẹ quanh trục AB. Cố gắng giữ tổng góc dao động nhỏ hơn 5o.
d) Để bệ đo dao động một cách ổn định và đo thời gian cần thiết để bệ đo dao động 50 lần bằng đồng hồ bấm giây. Lặp lại quy trình này ba lần lấy giá trị trung bình của ba lần đo. Kết quả trung bình được tính là chu kỳ dao động.
e) Tính mô men quán tính của mô tô quanh trục x, Ixm, tính bằng kgm2, theo công thức (2):
Ixm = (![]() - Ixp – mm(
- Ixp – mm(![]() ) (2)
) (2)
Trong đó:
TxT là chu kỳ dao động của bệ đo có mô tô đặt ở trên quanh trục AB, tính bằng s;
cT là khoảng cách theo trục z từ mũi dao đo đến trọng tâm của tổ hợp mô tô và bệ đo, tính bằng m;
yT là khoảng cách dọc theo trục y từ mũi dao đo đến trọng tâm của tổ hợp bệ đo và mô tô, tính bằng m;
mT là khối lượng của tổ hợp bệ đo và mô tô, tính bằng kg;
Ixp là mô men quán tính của bệ đo đối với trục AB (kgm2) [xem công thức (1)];
g là gia tốc trọng trường (9,81 m/s2);
mm là khối lượng của mô tô, tính bằng kg;
cm: là khoảng cách dọc theo trục z từ mũi dao đo đến trọng tâm của mô tô, tính bằng m;
ym: là khoảng cách dọc theo trục y từ mũi dao đo đến trọng tâm của mô tô, tính bằng m.
a) nhìn từ phía bên
b) nhìn từ phía sau
CHÚ DẪN:
cm: là khoảng cách dọc theo trục z từ mũi dao đo đến trọng tâm của mô tô
cp: là khoảng cách dọc theo trục z từ mũi dao đo đến trọng tâm của bệ đo
cT: là khoảng cách dọc theo trục z từ mũi dao đo đến trọng tâm của bệ đo và mô tô
mm là khối lượng của mô tô
mP là khối lượng của bệ đo
mT là khối lượng của bệ đo và mô tô
ym: là khoảng cách dọc theo trục y từ mũi dao đo đến trọng tâm của mô tô
yP: là khoảng cách dọc theo trục y từ mũi dao đo đến trọng tâm của bệ đo
yT: là khoảng cách dọc theo trục y từ mũi dao đo đến trọng tâm tổ hợp ô tô và bệ đo
Hình 2 – Phương pháp đo mô men quán tính lắc ngang của mô tô (theo nguyên lý con lắc vật lý)
6.3. Mô men quán tính quay quanh trục y (nguyên lý con lắc vật lý)
6.3.1. Mô men quán tính quay quanh trục CD của bệ đo.
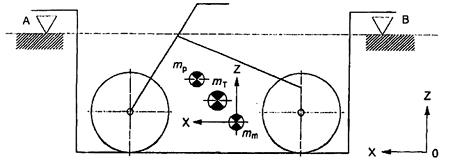
Mô men quán tính với trục CD của bệ đo sẽ được đo theo quy trình dưới đây (Hình 3).
a) Đặt mũi dao đo C và D trên giá sao cho chúng có thể dao động tự do quanh trục CD.
b) Cho bệ đo dao động nhẹ quanh trục CD. Cố gắng giữ tổng góc dao động nhỏ hơn 5o.
c) Để bệ đo dao động một cách ổn định và đo thời gian cần thiết để bệ đo dao động 50 lần bằng đồng hồ bấm giây. Lặp lại quy trình này ba lần lấy giá trị trung bình của ba lần đo. Kết quả trung bình được tính là chu kỳ dao động.
d) Tính mô men quán tính của mô tô quanh trục CD, Iyp, tính bằng kgm2, theo công thức (3):
Iyp = (![]() (3)
(3)
Trong đó:
Typ là chu kỳ dao động của bệ đo quanh trục CD, tính bằng s;
cP là khoảng cách theo trục z từ mũi dao đo đến trọng tâm của bệ đo, tính bằng m;
xP là khoảng cách theo trục x từ mũi dao đo đến trọng tâm của bệ đo, tính bằng m;
mP là khối lượng bệ đo, tính bằng kg;
g là gia tốc trọng trường (9,81 m/s2);
a) nhìn từ phía bên
b) nhìn từ phía sau
CHÚ DẪN:
cP khoảng cách theo trục z từ mũi dao đo đến trọng tâm của bệ đo
mP khối lượng của bệ đo
xP khoảng cách theo trục x từ mũi dao đo đến trọng tâm của bệ đo
6.3.2. Mô men quán tính lắc dọc trục y của mô tô
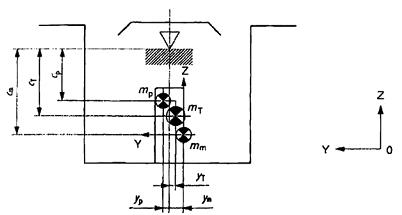
Mô men quán tính lắc dọc trục x sẽ được đo theo trình tự sau (Hình 4).
CHÚ THÍCH: Cách đo này được áp dụng cho cả mô tô không người lái và mô tô có người lái.
a) Đặt mô tô lên bệ đo và cố định mô tô sao cho mô tô không di chuyển. Góc nghiêng ngang của mô tô đối với bệ đo phải nằm trong khoảng 0o ± 0,5o.
b) Đặt mũi dao đo C và D trên giá sao cho chúng có thể dao động tự do quanh trục CD.
c) Cho tổ hợp mô tô và bệ đo dao động nhẹ quanh trục CD. Cố gắng giữ cho tổng góc độ dao động nhỏ hơn 5o.
d) Để bệ đo dao động một cách ổn định và đo thời gian cần thiết để bệ đo dao động 50 lần bằng đồng hồ bấm giây. Lặp lại quy trình này ba lần lấy giá trị trung bình của ba lần đo. Kết quả trung bình được tính là chu kỳ dao động.
e) Tính toán mô men quán tính của mô tô đối với trục y, Iym, tính bằng kgm2, theo công thức (4):
Iym = (![]() - mTg – Iyp – mm(
- mTg – Iyp – mm(![]() ) (4)
) (4)
Trong đó:
TyT là thời gian của một chu kỳ dao động của bệ đo có mô tô đặt ở trên quanh trục CD, tính bằng s;
cT là khoảng cách theo trục z từ mũi dao đo đến trọng tâm của tổ hợp mô tô và bệ đo, tính bằng s;
xT là khoảng cách dọc theo trục x từ mũi dao đo đến trọng tâm của tổ hợp mô tô và bệ đo, tính bằng m;
mT là khối lượng của tổ hợp bệ đo và mô tô, tính bằng kg;
g là gia tốc trọng trường (9,81 m/s2);
Iyp là mô men quán tính của bệ đo quanh trục CD, tính bằng kgm2 [xem công thức (3)];
mm là khối lượng của mô tô, tính bằng kg;
cm: là khoảng cách dọc theo trục z từ mũi dao đo đến trọng tâm của mô tô, tính bằng m;
xm: là khoảng cách dọc theo trục x từ mũi dao đo đến trọng tâm của mô tô, tính bằng m.
a) nhìn từ phía bên
b) nhìn từ phía sau
CHÚ DẪN:
cm: là khoảng cách dọc theo trục z từ mũi dao đo đến trọng tâm của mô tô
cp: là khoảng cách dọc theo trục z từ mũi dao đo đến trọng tâm của bệ đo
cT: là khoảng cách dọc theo trục z từ mũi dao đo đến trọng tâm của bệ đo và mô tô
mm là khối lượng của mô tô
mP là khối lượng của bệ đo
mT là khối lượng của mô tô và bệ đo
xm: là khoảng cách dọc theo trục x từ mũi dao đo đến trọng tâm của mô tô
xP: là khoảng cách dọc theo trục x từ mũi dao đo đến trọng tâm của bệ đo
xT: là khoảng cách dọc theo trục x từ mũi dao đo đến trọng tâm tổ hợp ô tô và bệ đo
Hình 4 – Phương pháp đo mô men quán tính dọc của mô tô (theo nguyên lý con lắc vật lý sử dụng một bệ đo)
6.4. Mô men quán tính quay quanh trục z (nguyên lý con lắc vật lý hai dây)
6.4.1. Mô men quán tính quay quanh trục thẳng đứng của bệ đo
Mô men quán tính quanh trục thẳng đứng đi qua tâm E của bề mặt đáy của bệ đo sẽ được đo theo các bước dưới đây (Hình 5).
a) Thiết lập khối lượng md1 sao cho trọng tâm của bệ đo nằm trên đường thẳng đi qua tâm E của bệ đo. Tính toán vị trí của trọng lượng điều chỉnh theo công thức (5):
xd1 = ![]() ; yd1 =
; yd1 = ![]() (5)
(5)
Trong đó:
xd1 là khoảng cách dọc trục x từ tâm của bệ đo tới khối lượng md1, tính bằng m;
yd1 là khoảng cách dọc trục y từ tâm của bệ đo tới khối lượng md1, tính bằng m;
mp là khối lượng của bệ đo, tính bằng m;
xp là khoảng cách dọc trục x từ tâm của bệ đo tới trọng tâm của bệ đo, tính bằng m;
yp là khoảng cách dọc trục y từ tâm của bệ đo tới trọng tâm của bệ đo, tính bằng kg;
md1 là khối lượng của quả cân dùng để điều chỉnh vị trí trọng tâm của bệ đo, tính bằng kg;
CHÚ THÍCH: Khi tâm E và trọng tâm của bệ đo trùng nhau, giá trị của các khoảng cách sẽ bằng không.
b) Treo bệ đo bằng 2 dây có cùng chiều dài;
c) Cho toàn bộ bệ đo dao động trục thẳng đứng đi qua điểm Ε. Cố gắng giữ cho tổng góc dao động nhỏ hơn 5o.
d) Để bệ đo dao động một cách ổn định và đo thời gian cần thiết để bệ đo dao động 50 lần bằng đồng hồ bấm giấy. Lặp lại quy trình này 3 lần lấy giá trị trung bình của 3 lần đo. Kết quả trung bình được tính là chu kỳ dao động.
e) Tính toán mô men quán tính của bệ đo quanh trục z, Izp, tính bằng kgm2 theo công thức (6):
lp![]() = xp
= xp![]() + yp
+ yp![]()
ld1![]() = xd1
= xd1![]() + yd1
+ yd1![]() (6)
(6)
lzp = (![]()
Trong đó:
Ip là khoảng cách từ tâm của bệ đo đến trọng tâm của bệ đo, tính bằng m;
ld1 là khoảng cách từ tâm của bệ đo đến khối lượng md1, tính bằng m;
Tzp là chu kỳ dao động của bệ đo quanh trục thẳng đứng đi qua điểm E, tính bằng s;
a là một nửa khoảng cách giữa hai điểm cố định ở dưới của dây treo bệ đo, tính bằng m;
b là một nửa khoảng cách giữa hai điểm cố định phía trên của dây treo bệ đo, tính bằng m;
h là khoảng cách dọc theo trục z giữa hai điểm trên và dưới của dây treo bệ đo, tính bằng m;
g là gia tốc trọng trường (9,81 m/s2).
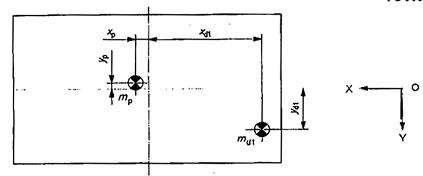
a) nhìn từ trên

b) nhìn từ phía bên
CHÚ DẪN:
a là một nửa khoảng cách giữa hai điểm cố định ở dưới của dây treo bệ đo
b là một nửa khoảng cách giữa hai điểm cố định phía trên của dây treo bệ đo
h là khoảng cách dọc theo trục z giữa hai điểm trên và dưới của dây treo bệ đo
md1 là khối lượng dùng để điều chỉnh vị trí trọng tâm của bệ đo
mp là khối lượng của bệ đo
xd1 là khoảng cách theo trục x từ tâm của bệ đo đến khối lượng md1
xp là khoảng cách theo trục x từ tâm của bệ đo đến trọng tâm của bệ đo
yd1 là khoảng cách theo trục y từ tâm của bệ đo đến khối lượng md1
yp là khoảng cách theo trục y từ tâm của bệ đo đến trọng tâm của bệ đo
E là tâm của mặt phẳng đáy của bệ đo
Hình 5 – Phương pháp đo mô men quán tính quay quanh của bệ đo (nguyên lý con lắc vật lý hai dây)
6.4.2. Mô men quán tính quay quanh trục z của mô tô
Mô men quán tính quay quanh trục z của mô tô được đo theo các bước dưới đây (như Hình 6).
CHÚ THÍCH: Áp dụng phương pháp đo này cho trường hợp mô tô có người lái và mô tô không có người lái.
a) Đặt mô tô trên mặt phẳng và cố định nó để nó không thể di chuyển. Góc nghiêng ngang của mô tô trên mặt phẳng phải trong khoảng dung sai 0o ± 0,5o.
b) Vị trí của mô tô sao cho trọng tâm của nó trên đường trục giao của điểm E của mặt phẳng. Nếu không thể điều chỉnh được, đặt khối lượng md2 như trong Hình 6.
c) Tính toán tọa độ của khối lượng theo công thức (7):
xd2 = ![]() ; yd2 =
; yd2 = ![]() (7)
(7)
Trong đó:
xd2 là khoảng cách theo trục x từ tâm của bệ đo tới khối lượng md2, tính bằng m;
yd2 là khoảng cách theo trục y từ tâm của bệ đo đến khối lượng md2, tính bằng m;
mm là khối lượng của mô tô, tính bằng kg;
xm là khoảng cách theo trục x từ tâm của bệ đo tới trọng tâm của mô tô, tính bằng m;
ym là khoảng cách theo trục y từ tâm của bệ đo tới trọng tâm của mô tô, tính bằng m;
md2 là khối lượng của vật nặng dùng để điều chỉnh vị trí trọng tâm của mô tô, tính bằng kg;
CHÚ THÍCH: Khi tâm E, và trọng tâm của mô tô trùng nhau thì giá trị các khoảng cách bằng không.
d) Cho tổ hợp bệ đo/mô tô dao động quanh trục thẳng đứng đi qua điểm Ε. Cố gắng giữ cho tổng góc dao động nhỏ hơn 5o.
e) Để bệ đo dao động một cách ổn định và đo thời gian cần thiết để bệ đo dao động 50 lần bằng đồng hồ bấm giấy. Lặp lại quy trình này 3 lần lấy giá trị trung bình của 3 lần đo. Kết quả trung bình được tính là chu kỳ dao động.
f) Tính toán mô men quán tính của mô tô quanh trục z, Izm, tính bằng kgm2 theo công thức (8):
lm![]() = xm
= xm![]() + ym
+ ym![]()
ld2![]() = xd2
= xd2![]() + yd2
+ yd2![]()
lzm = (![]()
Trong đó:
Im là khoảng cách từ tâm của bệ đo đến trọng tâm của mô tô, tính bằng m;
ld2 là khoảng cách từ tâm của bệ đo đến quả cân md2, tính bằng m;
TzT là chu kỳ dao động của bệ đo với mô tô đặt trên nó cùng dao động, tính bằng s;
a là một nửa khoảng cách giữa hai điểm cố định ở dưới của dây treo bệ đo, tính bằng m;
b là một nửa khoảng cách giữa hai điểm cố định phía trên của dây treo bệ đo, tính bằng m;
h là khoảng cách dọc theo trục z giữa hai điểm trên và dưới của dây treo bệ đo, tính bằng m;
mp là khối lượng của bệ đo, tính bằng (kg);
md1 là khối lượng của quả cân dùng để điều chỉnh vị trí trọng tâm của bệ đo, tính bằng (kg);
g là gia tốc trọng trường (9,81 m/s2).
Izp: mô men quán của bệ đo đối với trục z, tính bằng kgm2 [xem công thức (6)].
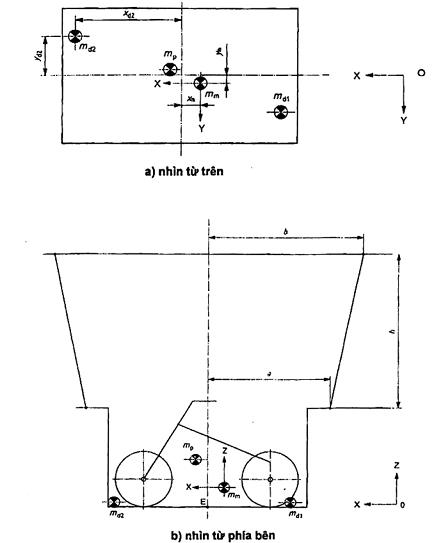
CHÚ DẪN:
a là một nửa khoảng cách giữa hai điểm cố định ở dưới của dây treo bệ đo
b là một nửa khoảng cách giữa hai điểm cố định phía trên của dây treo bệ đo
h là khoảng cách dọc theo trục z giữa hai điểm trên và dưới của dây treo bệ đo
md1 là khối lượng quả cân dùng để điều chỉnh vị trí trọng tâm của bệ đo
md2 là khối lượng quả cân dùng để điều chỉnh vị trí trọng tâm của mô tô
mm là khối lượng của mô tô
mp là khối lượng của bệ đo
xd2 là khoảng cách theo trục x từ tâm của bệ đo đến quả cân md2
xm là khoảng cách theo trục x từ tâm của bệ đo đến trọng tâm của mô tô
yd2 là khoảng cách theo trục y từ trọng tâm của bệ đo đến quả cân md2
ym là khoảng cách theo trục y từ tâm của bệ đo đến trọng tâm của mô tô
E là tâm của mặt phẳng dưới của bệ đo
Hình 6 – Phương pháp đo mô men quán tính đảo lái của mô tô (với nguyên lý con lắc 2 dây dùng với bệ đo)
7. Kết quả thử nghiệm
Ghi lại các kết quả trong báo cáo kết quả đo như chỉ dẫn trong Phụ lục A. Làm tròn các giá trị mô men quán tính đến 3 chữ số có nghĩa.
PHỤ LỤC A
(Qui định)
MẪU BÁO CÁO KẾT QUẢ ĐO
Mẫu theo phụ lục này phải được dùng để ghi các kết quả đo mô men quán tính của mô tô được tính toán theo tiêu chuẩn này.
| Mô tô - mô men quán tính - Kết quả đo theo TCVN 7059 |
| 1. Nhận dạng mô tô 1.1 Nhãn hiệu, mẫu, kiểu loại: 1.2 Năm sản xuất: 1.3 Phần mô tả phương tiện (VDS) (theo TCVN 6578) 1.4 Áp suất lốp: trước:……………………………………..kPa/ sau:………………………………………kPa 1.5 Chỉnh đặt hệ thống treo (nếu điều chỉnh được): 1.6 Vị trí cố định của hệ thống treo: trướca…………………………………saub……………………………… 1.7 Các điều kiện khác:…………………………………………………………………
2 Điều kiện thử 2.1 Ngày thử nghiệm: 2.2 Nơi thử nghiệm: 2.3 Người đo: 2.4 Người láid: Không/người nộm/người thật: 2.5 Tài liệu tham khảo về người nộm (nếu áp dụng): 2.6 Vị trí chỗ ngồie:……………………………………………………………………………………………..mm 2.7 Góc tư thế ngồif…………………………………………………………………………………………….độ 2.8 Điều kiện đo theo chu kỳ g:………………………………………………………………………………..độ
3 Kết quả thử nghiệm 3.1 Mô men quán tính lắc ngang quanh trục x của mô tô, Ixm………………………………………kgm2 3.2 Mô men quán tính lắc dọc quanh trục y của mô tô, Iym:…………………………………………...kgm2 3.3 Mô men quán tính quay quanh trục z của mô tô, Izm…………………………………………………kgm2 |
| a Khoảng cách từ tâm của ống cổ đến mặt đất. Nếu không thể đo được khoảng cách này, thì ghi lại điểm chuẩn trên phần treo bằng hệ lò xo của càng trước mô tô và đo khoảng các từ điểm này đến mặt đất. b Khoảng cách từ tâm bulông đầu trên của treo sau đến mặt đất. Nếu khoảng cách này không đo được thì ghi điểm chuẩn trên trục lò xo sau mô tô và đo khoảng cách từ điểm này đến mặt đất. c Xem điều 4: ghi lại điều kiện đo được thay đổi hoặc thêm vào. d Xóa tên trong danh sách ("Không", "người nộm", "người thật") nếu không áp dụng. e Khoảng cách từ trục trước đến điểm H dọc theo trục x. Điểm H là tâm quay của thân người lái. f Góc tạo bởi giữa đường nối điểm H và S và trục x, điểm S tâm quay của thân người lái và cánh tay g Nếu phương pháp đo khác với phương pháp được mô tả trong tiêu chuẩn này. |
Bạn chưa Đăng nhập thành viên.
Đây là tiện ích dành cho tài khoản thành viên. Vui lòng Đăng nhập để xem chi tiết. Nếu chưa có tài khoản, vui lòng Đăng ký tại đây!
