- Tổng quan
- Nội dung
- Tiêu chuẩn liên quan
- Lược đồ
- Tải về
Tiêu chuẩn Quốc gia TCVN 7559:2005 ISO 8855:1991 Động lực học và khả năng bám đường của xe
| Số hiệu: | TCVN 7559:2005 | Loại văn bản: | Tiêu chuẩn Việt Nam |
| Cơ quan ban hành: | Bộ Khoa học và Công nghệ | Lĩnh vực: | Giao thông |
|
Ngày ban hành:
Ngày ban hành là ngày, tháng, năm văn bản được thông qua hoặc ký ban hành.
|
2005 |
Hiệu lực:
|
Đã biết
|
| Người ký: | Đang cập nhật |
Tình trạng hiệu lực:
Cho biết trạng thái hiệu lực của văn bản đang tra cứu: Chưa áp dụng, Còn hiệu lực, Hết hiệu lực, Hết hiệu lực 1 phần; Đã sửa đổi, Đính chính hay Không còn phù hợp,...
|
Đã biết
|
TÓM TẮT TIÊU CHUẨN VIỆT NAM TCVN 7559:2005
Nội dung tóm tắt đang được cập nhật, Quý khách vui lòng quay lại sau!
Tải tiêu chuẩn Việt Nam TCVN 7559:2005
 Tiêu chuẩn Việt Nam TCVN 7559:2005 PDF (Bản có dấu đỏ)
Tiêu chuẩn Việt Nam TCVN 7559:2005 PDF (Bản có dấu đỏ) Tiêu chuẩn Việt Nam TCVN 7559:2005 DOC (Bản Word)
Tiêu chuẩn Việt Nam TCVN 7559:2005 DOC (Bản Word)TIÊU CHUẨN QUỐC GIA
TCVN 7559 : 2005
ISO 8855 : 1991
PHƯƠNG TIỆN GIAO THÔNG ĐƯỜNG BỘ - ĐỘNG LỰC HỌC VÀ KHẢ NĂNG BÁM ĐƯỜNG CỦA XE – TỪ VỰNG
Road vehicles - Vehicle dynamics and road-holding ability – Vocabulary
Lời nói đầu
TCVN 7559 : 2005 hoàn toàn tương đương ISO 8855 : 1991 với những thay đổi biên tập cho phép.
TCVN 7559 : 2005 do Ban kỹ thuật tiêu chuẩn TCVN/TC 22 Phương tiện giao thông đường bộ và Cục Đăng kiểm Việt Nam biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công ban hành.
Tiêu chuẩn này được chuyển đổi năm 2008 từ Tiêu chuẩn Việt Nam cùng số hiệu thành Tiêu chuẩn Quốc gia theo quy định tại Khoản 1 Điều 69 của Luật Tiêu chuẩn và Quy chuẩn kỹ thuật và điểm a khoản 1 Điều 6 Nghị định số 127/2007/NĐ-CP ngày 1/8/2007 của Chính phủ quy định chi tiết thi hành một số điều của Luật Tiêu chuẩn và Quy chuẩn kỹ thuật.
PHƯƠNG TIỆN GIAO THÔNG ĐƯỜNG BỘ - ĐỘNG LỰC HỌC VÀ KHẢ NĂNG BÁM ĐƯỜNG CỦA XE – TỪ VỰNG
Road vehicles - Vehicle dynamics and road-holding ability - Vocabulary
1. Phạm vi áp dụng
Tiêu chuẩn này định nghĩa các thuật ngữ cơ bản về động lực học xe. Các thuật ngữ được định nghĩa áp dụng cho phương tiện giao thông đường bộ (sau đây gọi tắt là xe, chẳng hạn như ô tô con và ô tô chở hàng (ô tô tải).
CHÚ THÍCH: Tiêu chuẩn này ghi nhận khả năng lái nhiều trục nhưng ở đây không định nghĩa những thuật ngữ bao hàm khả năng này.
2. Hệ trục
2.1. Hệ trục cố định trên mặt đỗ xe (earth-fixed axis system) (XE, YE, ZE)
Hệ trục vuông góc theo qui tắc bàn tay phải cố định trên mặt đỗ xe. Trục XE, YE nằm trong mặt phẳng nằm ngang (mặt đỗ xe) và trục ZE hướng lên trên.
2.2. Hệ trục xe (vehicle axis system) (XV, YV, ZV)
Hệ trục vuông góc theo qui tắc bàn tay phải cố định tại một điểm nào đó trên xe (thông thường là trọng tâm) sao cho trục XV nằm ngang trong mặt phẳng đối xứng dọc của xe và hướng về phía trước, trục YV vuông góc với mặt phẳng đối xứng dọc của xe và hướng về phía bên trái người lái, trục ZV hướng lên trên.
CHÚ THÍCH: Sự định hướng hệ trục xe (XV, YV, ZV) so với hệ trục cố định trên mặt đỗ xe (XE, YE, ZE) theo trình tự ba lần xoay được trình bày trong bảng 1.
2.3. Hệ trục trung gian (intermediate axis system) (X, Y, Z)
Hệ trục vuông góc theo qui tắc bàn tay phải, trong đó mặt phẳng XY trùng với mặt phẳng XEYE, trục X là hình chiếu của trục XV trên mặt phẳng XEYE và trục Z hướng lên trên.
2.4. Hệ trục bánh xe (wheel axis system) (XW, YW, ZW) Xem 8.1.1.
3. Động học của khối lượng được treo
3.1. Thông số của chuyển động thẳng
3.1.1. Vận tốc xe (vehicle velocity) ![]() : Đại lượng vectơ biểu thị vận tốc của gốc hệ trục xe trong hệ trục cố định trên mặt đỗ xe.
: Đại lượng vectơ biểu thị vận tốc của gốc hệ trục xe trong hệ trục cố định trên mặt đỗ xe.
3.1.1.1. Vận tốc dọc xe (longitudinal velocity) vX: Thành phần của vận tốc xe theo phương trục X.
3.1.1.2. Vận tốc ngang xe (lateral velocity) vY: Thành phần của vận tốc xe theo phương trục Y.
3.1.1.3. Vận tốc xe thẳng đứng (vertical velocity) vZ: Thành phần của vận tốc xe theo phương trục Z.
3.1.1.4. Vận tốc xe trong mặt phẳng nằm ngang (horizontal velocity) vh: Tổng hợp của vận tốc dọc xe vX và vận tốc ngang xe vY.
3.1.2. Gia tốc xe (vehicle acceleration) ![]() : Đại lượng vectơ biểu thị gia tốc của gốc hệ trục xe trong hệ trục cố định trên mặt đất.
: Đại lượng vectơ biểu thị gia tốc của gốc hệ trục xe trong hệ trục cố định trên mặt đất.
3.1.2.1. Gia tốc dọc xe (longitudinal acceleration) aX: Thành phần của gia tốc xe theo phương trục X.
3.1.2.2. Gia tốc ngang xe (lateral acceleration) aY: Thành phần của gia tốc xe theo phương trục Y.
3.1.2.3. Gia tốc xe thẳng đứng (vertical acceleration) aZ: Thành phần của gia tốc xe theo phương trục Z.
3.1.2.4. Gia tốc hướng tâm (centripetal acceleration) ac: Thành phần của gia tốc xe theo hướng nằm ngang vuông góc với vận tốc trong mặt phẳng nằm ngang vh.
3.1.2.5. Gia tốc tiếp tuyến (tangential acceleration) at: Thành phần của gia tốc xe theo phương của vận tốc trong mặt phẳng nằm ngang vh.
3.1.2.6. Gia tốc xe trong mặt phẳng nằm ngang (horizontal acceleration) ah: Tổng hợp của gia tốc dọc xe aX và gia tốc ngang xe aY hoặc gia tốc hướng tâm ac và gia tốc tiếp tuyến at
CHÚ THÍCH: Cũng có thể phân tích vận tốc xe và gia tốc xe theo các hướng XV, YV, ZV để tạo thành  và
và 
3.2. Thông số của chuyển động quay
3.2.1. Góc
Xem hình B.1, thể hiện các góc dương.
3.2.1.1. Góc xoay xe (yaw angle) y: Góc (XE, X) xung quanh trục ZE.
3.2.1.2. Góc nghiêng dọc xe (pitch angle) q: Góc (X, XV) xung quanh trục Y.
3.2.1.3. Góc nghiêng ngang xe (roll angle) j: Góc (Y, YV) xung quanh trục XV.
CHÚ THÍCH: Góc nghiêng ngang của xe so với mặt đỗ xe (xem 5.4.1) khác với góc nghiêng ngang xe được định nghĩa ở đây.
Bảng 1 - Định hướng hệ trục xe so với hệ trục cố định trên mặt đỗ xe
| Trình tự xoay | Góc tạo ra khi xoay | Bản chất sự xoay 1) | Trục được xác định ở mỗi lần xoay | Trục được xác định trong quá trình xoay |
| Xoay lần một | Góc xoay xe (y) | (XE, X) xung quanh trục ZE | X, Y | XE, YE, ZE X, Y, Z |
| Xoay lần hai | Góc nghiêng dọc xe (q) | (X, XV) xung quanh trục Y | XV | XE, YE, ZE, X, Y, Z XV |
| Xoay lần ba | Góc nghiêng ngang xe (j) | (Y, YV) xung quanh trục XV | YV ZV | XE, YE, ZE, X, Y, Z, XV, YV, ZV |
| 1) Ví dụ như góc (XE, X) biểu thị góc từ trục XE đến trục X | ||||
3.2.1.4. Góc trượt ngang xe (sideslip angle) b: Góc từ trục X quay xung quanh trục Z đến hướng của vận tốc xe trong mặt phẳng nằm ngang (hình B.2 thể hiện góc dương). Có thể tính toán góc trượt ngang xe từ vận tốc dọc xe VX và vận tốc ngang xe VY:

3.2.2. Vận tốc góc của xe
CHÚ THÍCH: Có thể định nghĩa vận tốc góc của xe trong cả hệ trục xe và hệ trục trung gian, nhưng ưu tiên định nghĩa như trong 3.2.2.1 đến 3.2.2.3.
3.2.2.1. Vận tốc góc xoay xe (yaw velocity):

3.2.2.2. Vận tốc góc nghiêng dọc xe (pitch velocity):

3.2.2.3. Vận tốc góc nghiêng ngang xe (roll velocity):

3.2.3. Gia tốc góc của xe
CHÚ THÍCH: Có thể định nghĩa gia tốc góc của xe trong cả hệ trục xe và hệ trục trung gian, nhưng ưu tiên định nghĩa như trong 3.2.3.1 đến 3.2.3.3.
3.2.3.1. Gia tốc góc xoay xe (yaw acceleration):

3.2.3.2. Gia tốc góc nghiêng dọc xe (pitch acceleration):

3.2.3.3. Gia tốc góc nghiêng ngang xe (roll acceleration):

3.3. Kích thước quĩ đạo xe
3.3.1. Quĩ đạo xe (trajectory): Hình chiếu đường đi của gốc hệ trục xe trên mặt phẳng XEYE.
3.3.2. Bán kính quĩ đạo xe (path radius) R: Khoảng cách giữa một điểm nằm trên quĩ đạo xe và tâm tức thời vốn có, được tính toán như sau:

3.3.3. Độ cong quĩ đạo xe (curvature of trajectory) k:

3.3.4. Góc hành trình xe (course angle) v: Góc từ trục XE quay xung quanh trục Z đến phương của vận tốc xe trong mặt phẳng nằm ngang (hình B.2 thể hiện góc dương), có thể được tính toàn từ góc xoay xe y và góc trượt ngang xe b:

4. Lực và mô men
Ngoại lực tác dụng lên xe vào thời điểm bất kỳ đều có thể được tổng hợp thành một vectơ lực  và một vectơ mô men lực
và một vectơ mô men lực 
4.1. Thành phần của lực 
4.1.1. Lực dọc xe (longitudinal force) FX: Thành phần của lực theo phương trục X.
4.1.2. Lực ngang xe (lateral force) FY: Thành phần của lực theo phương trục Y.
4.1.3. Lực thẳng đứng tác dụng lên xe (vertical force) FZ: Thành phần của lực theo phương trục Z.
4.2. Thành phần của mô men 
4.2.1. Mô men xoay xe (yawing moment) MZ: Thành phần của mô men theo phương trục Z.
4.2.2. Mô men nghiêng dọc xe (pitching moment) MY: Thành phần của mô men theo phương trục Y.
4.2.3. Mô men nghiêng ngang xe (vehicle rolling moment) MX: Thành phần của mô men theo phương trục X.
5. Hệ treo và lái
5.1. Hướng và kích thước định vị bánh xe
5.1.1. Thuật ngữ và kích thước chung
5.1.1.1. Mặt phẳng bánh xe (wheel plane): Mặt phẳng trung tâm vành bánh xe và vuông góc với trục quay bánh xe.
5.1.1.2. Tâm bánh xe (wheel centre): Điểm mà tại đó trục quay bánh xe cắt mặt phẳng bánh xe.
5.1.1.3. Tâm tiếp xúc lốp (centre of tyre contact): Giao điểm nằm trên mặt đỗ xe giữa mặt phẳng bánh xe và hình chiếu đứng của trục quay bánh xe. (Xem A.1)
5.1.1.4. Chiều dài cơ sở (wheelbasse) l: Khoảng cách giữa các tâm tiếp xúc lốp của hai bánh xe ở cùng một bên xe được chiếu lên trục X.
CHÚ THÍCH: Đối với xe có từ ba trục trở lên, chiều dài cơ sở giữa hai bánh xe trên các trục kế tiếp được chỉ rõ bắt đầu từ trục đầu tiên đến trục sau cùng. Tổng chiều dài cơ sở cho bên phải hoặc bên trái xe là tổng các khoảng cách này.
5.1.1.5. Vệt bánh xe (track) b: Khoảng cách giữa các tâm tiếp xúc lốp của hai bánh xe trên một trục được chiếu lên mặt phẳng YZ. Trong trường hợp bánh xe kép, đó sẽ là khoảng cách các điểm nằm giữa các tâm tiếp xúc lốp của hai bánh xe thuộc bánh xe kép.
CHÚ THÍCH: Nói chung, chiều dài cơ sở và vệt bánh xe có thể thay đổi.
5.1.2. Hình học trụ đứng
5.1.2.1. Trụ đứng (steering axis): Trục mà bánh xe xoay xung quanh, tương đối so với thân xe khi lái với hệ thống lái không chịu tải trừ những tải liên quan đến trạng thái tĩnh chuẩn. (Xem A.2)
CHÚ THÍCH: Trục này có thể dịch chuyển khi thay đổi góc lái do động học và biến dạng của hệ treo.
5.1.2.2. Góc nghiêng ngang trụ đứng (kingpin inclination angle) s: Góc giữa trục Z và trụ đứng được chiếu lên mặt phẳng YZ. Góc này dương khi đỉnh trụ đứng nghiêng vào trong.
5.1.2.3. Khoảng lệch trụ đứng trên mặt đỗ xe (kingpin offset at ground) r: Khoảng cách giữa giao điểm của trụ đứng với mặt đỗ xe và tâm tiếp xúc lốp.
5.1.2.4. Khoảng lệch trụ đứng tại moay ơ (kingpin offset at hub) q: Khoảng cách vuông góc giữa tâm bánh xe và trụ đứng. Khoảng cách này dương khi tâm bánh xe xa hơn trụ đứng về phía ngoài.
5.1.2.5. Khoảng lệch ngang trụ đứng trên mặt đỗ xe (transverse offset at ground) rs: Hình chiếu lên trục YW của khoảng lệch trụ đứng trên mặt đỗ xe r. Khoảng lệch này dương khi tâm tiếp xúc lốp nằm ngoài giao điểm giữa trụ đứng và mặt đỗ xe.
5.1.3. Thông số nghiêng dọc trụ đứng
5.1.3.1. Góc nghiêng dọc trụ đứng (caster angle) T: Góc giữa trục Z và hình chiếu của trụ đứng trên mặt phẳng XZ. Góc này dương khi đỉnh trụ đứng nghiêng về phía sau.
5.1.3.2. Khoảng lệch dọc trụ đứng trên mặt đỗ xe (castor offset) rT: Hình chiếu lên trục XW của khoảng lệch trụ đứng trên mặt đỗ xe r. Khoảng lệch này dương khi tâm tiếp xúc lốp nằm sau giao điểm giữa trụ đứng và mặt đỗ xe.
5.1.4. Thông số nghiêng bánh xe
5.1.4.1. Góc nghiêng bánh xe (trong hệ trục trung gian) (camber angle) eV: Góc giữa trục Z và mặt phẳng bánh xe. Góc này dương khi phần trên bánh xe nghiêng hướng ra ngoài so với thân xe.
5.1.5. Hệ lái (Xem hình B.2)
5.1.5.1. Góc lái (steer angle) δ: Góc từ trục X đến trục XW. Góc này dương ứng với sự quay vòng dương xung quanh trục ZW.
5.1.5.2. Góc chụm tĩnh tổng (total static toe angle) ∆: Tổng giá trị tuyệt đối các góc lái của hai bánh xe trên một trục khi hệ lái ở vị trí thẳng phía trước. Góc tổng này dương khi các bánh xe hướng chụm lại về phía trước.
5.1.5.3. Độ chụm tĩnh (static toe-in): Sai lệch giữa các khoảng cách ngang nằm giữa các mép ngoài ở phía trước và phía sau các vành bánh xe trên một trục. Các khoảng cách được đo trong cùng một mặt phẳng nằm ngang đi qua các tâm bánh xe. Độ lệch này dương khi các bánh xe cùng hướng chụm lại về phía trước.
5.1.5.4. Góc lái lý thuyết (ackermann steer angle) δA: Góc có tang bằng chiều dài cơ sở chia cho bán kính quĩ đạo điểm giữa trục sau xe ở vận tốc rất thấp.
CHÚ THÍCH: Đối với xe có từ hai trục sau trở lên, không thể xác định được tâm quay vòng và bán kính quĩ đạo điểm giữa trục sau bằng hình học.
5.1.5.5. Góc lái chuẩn động lực học (dynamic reference steer angle) δD: Góc có giá trị radian bằng chiều dài cơ sở chia cho bán kính quĩ đạo trọng tâm xe.
CHÚ THÍCH: Đối với các góc δA và δD, ký hiệu dương dùng cho quay vòng trái và ký hiệu âm dùng cho quay vòng phải.
5.1.5.6. Góc vành tay lái (steering-wheel angle) δH: Dịch chuyển góc của vành tay lái được đo từ vị trí xe tiến thẳng. Góc này dương khi xe quay vòng trái.
5.1.5.7. Mô men quay vành tay lái (steering-wheel torque) MH: Mô men quay do người lái tác dụng lên vành tay lái xung quanh trục quay của nó. Mô men này dương khi xe quay vòng trái.
5.1.5.8. Tỷ số lái toàn phần (overall steering ratio) iS: Tỷ số giữa dịch chuyển góc vành tay lái ở vị trí đã cho so với dịch chuyển góc lái trung bình của cặp bánh xe dẫn hướng với hệ thống lái không tải và xe ở điều kiện chuẩn tĩnh. (Xem A.2)
5.2. Sự ảnh hưởng đến hướng và vị trí bánh xe
Có những ảnh hưởng kết hợp của động học treo và các biến dạng đàn hồi khác nhau đến các đặc tính được định nghĩa trong 5.1.
5.2.1. Sai lệch góc lái (induced steer angle): Sự thay đổi góc lái bánh xe phát sinh do những ảnh hưởng kết hợp của động học treo và các biến dạng đàn hồi khác nhau. Sai lệch góc lái này là sai lệch quay vòng thiếu khi nó làm tăng xu hướng quay vòng thiếu hoặc giảm xu hướng quay vòng thừa của xe và là sai lệch quay vòng thừa trong trường hợp ngược lại.
5.2.2. Hệ số sai lệch góc lái (induced steer coefficient): Đạo hàm của sai lệch góc lái theo thông số đã cho ở trạng thái cân bằng ổn định đã biết. Người áp dụng phải xác định thông số liên quan và phải biểu diễn hệ số sai lệch góc lái dưới dạng đạo hàm riêng.
5.2.3. Sai lệch góc nghiêng bánh xe (induced camber angle): Sự thay đổi góc nghiêng bánh xe do những ảnh hưởng kết hợp của động học treo và những biến dạng đàn hồi khác nhau.
5.2.4. Hệ số sai lệch góc nghiêng bánh xe (induced camber coefficient): Đạo hàm của sai lệch góc nghiêng bánh xe theo thông số đã cho ở trạng thái cân bằng ổn định đã biết. Người áp dụng phải xác định thông số liên quan và phải biểu diễn hệ số sai lệch góc nghiêng bánh xe dưới dạng đạo hàm riêng.
5.3. Phân tách ảnh hưởng làm sai lệch hướng và vị trí bánh xe
Khi có khả năng và cần thiết thì có thể phân tách các ảnh hưởng làm sai lệch hướng và vị trí bánh xe thành những ảnh hưởng do động học hành trình bánh xe (5.3.1) và những ảnh hưởng do biến dạng đàn hồi (5.3.2).
5.3.1. Ảnh hưởng do động học hành trình bánh xe
Có những ảnh hưởng phát sinh từ dao động dọc và/hoặc dao động ngang của hệ treo, được tạo ra do sự thay đổi của lực tĩnh thẳng đứng đặt lên bánh xe.
5.3.1.1. Thay đổi góc lái do động học hành trình bánh xe (steer angle change due to wheel travel kinematics): Sự thay đổi góc lái của bánh xe do động học hành trình bánh xe.
5.3.1.2. Thay đổi góc nghiêng bánh xe do động học hành trình bánh xe (camber angle change due to wheel travel kinematics): Sự thay đổi góc nghiêng của bánh xe do động học hành trình bánh xe.
5.3.2. Ảnh hưởng do biến dạng đàn hồi
Có những ảnh hưởng phát sinh do những biến dạng đàn hồi của các phần tử treo/lái, các mối nối chúng và được tạo ra do sự thay đổi của lực dọc, ngang, mô men tác dụng tại tâm tiếp xúc lốp hoặc tâm bánh xe.
5.3.2.1. Thay đổi góc lái do biến dạng đàn hồi (compliance steer): Sự thay đổi của góc lái bánh xe do biến dạng đàn hồi.
5.3.2.2. Thay đổi góc nghiêng bánh xe do biến dạng đàn hồi (compliance camber angle): Sự thay đổi của góc nghiêng bánh xe do biến dạng đàn hồi.
5.4. Thông số nghiêng ngang
Các yếu tố được xem xét trong phần này khác với trong 3.2.1.3. Các yếu tố này liên quan đến mô hình đơn giản và cần được xem xét lại trong tương lai.
5.4.1. Góc nghiêng ngang xe so với mặt đỗ xe (vehicle roll angle) jV: Góc từ mặt phẳng XEYE đến trục YV.
5.4.2. Góc nghiêng ngang của hệ treo (suspension roll angle) jK: Góc từ đường thẳng nối các tâm bánh xe trên một trục đến mặt phẳng XVYV.
CHÚ THÍCH: Góc nghiêng ngang của hệ treo ở phía trước và phía sau có thể khác nhau.
5.4.3. Tâm nghiêng ngang (roll centre): Điểm nằm trong mặt phẳng thẳng đứng theo phương ngang xe, đi qua các tâm bánh xe trên một trục mà tại đó có thể tác dụng lực theo phương ngang xe vào khối lượng được treo mà không tạo ra góc nghiêng ngang của hệ treo.
5.4.4. Trục nghiêng ngang (roll axis): Đường thẳng nối các tâm nghiêng ngang phía trước và sau.
5.4.5. Độ cứng nghiêng ngang của hệ treo (suspension roll stiffness): Tỷ lệ giữa thay đổi vị trí của một điểm trên khối lượng được treo, có khả năng hồi vị do tác dụng hệ thống treo trên trên cặp bánh xe so với thay đổi góc nghiêng ngang của hệ treo.
5.4.6. Tổng độ cứng nghiêng ngang của hệ treo (toatal suspension roll stiffness): Tổng các độ cứng nghiêng ngang của các hệ treo riêng rẽ.
6. Phương thức điều khiển
6.1. Điều khiển vị trí (position control): Phương thức điều khiển xe, theo đó tác động đầu vào hoặc tác động cản trở được đặt lên hệ thống lái dưới dạng dịch chuyển tại một điểm điều khiển nào đó trong hệ thống lái (bánh xe trước, tay đòn dẫn động, vành tay lái) và không phụ thuộc vào lực.
6.2. Điều khiển cố định (fixed control): Phương thức điều khiển xe, theo đó vị trí của một điểm nào đó trong hệ thống lái (bánh xe trước, tay đòn dẫn động, vành tay lái) được giữ cố định. Đây là trường hợp đặc biệt của điều khiển vị trí.
6.3. Điều khiển lực (force control): Phương thức điều khiển xe, theo đó tác động đầu vào hoặc tác động cản trở được đặt lên hệ thống lái dưới dạng lực tại một điểm điều khiển nào đó trong hệ thống lái (bánh xe trước, tay đòn dẫn động, vành tay lái) và không phụ thuộc vào dịch chuyển.
6.4. Điều khiển tự do (free control): Phương thức điều khiển xe, theo đó không có tác động cản trở đặt lên hệ thống lái. Đây là trường hợp đặc biệt của điều khiển lực.
7. Sự đáp ứng
7.1. Phân loại đáp ứng
7.1.1. Đáp ứng của xe (vehicle response): Chuyển động của xe dưới một phương thức điều khiển xác định do tác động đầu vào nào đó lên xe từ bên trong hoặc bên ngoài. Đáp ứng của xe có thể do tác động đầu vào ở trạng thái ổn định, nhất thời hoặc biến đổi.
7.1.2. Đáp ứng điều khiển (control response): Chuyển động của xe dưới một phương thức điều khiển xác định do một hoặc nhiều tác động đầu vào lên thiết bị điều khiển (chẳng hạn như lái, phanh, tăng tốc).
7.1.3. Đáp ứng nhiễu loạn (disturbance response): Chuyển động của xe dưới một phương thức điều khiển xác định do những tác động không mong muốn lên xe (chẳng hạn như lực cản của gió hoặc tình trạng mặt đường).
7.2. Trạng thái cân bằng và tính ổn định
CHÚ THÍCH: Các hệ số đưa ra ở đây tuân theo những qui tắc toán học chung.
7.2.1. Trạng thái cân bằng ổn định (steady-state equilibrium): Trạng thái của xe khi tổng các lực, mô men bên ngoài và các lực, mô men quán tính cân bằng nhau tạo thành hệ thống lực, mô men không đổi trong một khung chuẩn (XV, YV, ZV) và (X, Y, Z). (Xem A.2)
7.2.2. Trạng thái nhất thời (transient state): Tất cả các trạng thái không phù hợp với 7.2.1.
7.2.3. Tính ổn định không theo chu kỳ (non-periodic stability): Đặc tính ổn định ở trạng thái cân bằng ổn định theo qui định, nếu xe quay trở lại trạng thái cân bằng ổn định mà không bị dao động sau khi chịu bất kỳ nhiễu loạn nhỏ tạm thời hoặc tác động điều khiển đầu vào nào.
7.2.4. Tính ổn định trung gian (neutral stability): Đặc tính ổn định ở trạng thái cân bằng ổn định theo qui định nếu đối với bất kỳ nhiễu loạn nhỏ tạm thời hoặc tác động điều khiển đầu vào nào, chuyển động của xe được tạo ra vẫn gần giống nhưng không quay trở lại chuyển động được xác định bởi trạng thái cân bằng ổn định.
7.2.5. Tính ổn định dao động (oscillatory stability): Đặc tính ổn định ở trạng thái cân bằng ổn định theo qui định nếu nhiễu loạn nhỏ tạm thời hoặc tác động điều khiển đầu vào gây ra đáp ứng của xe ở dạng dao động có biên độ giảm dần và quay trở lại trạng thái cân bằng ổn định ban đầu.
7.2.6. Tính mất ổn định không theo chu kỳ (non-periodic instability): Đặc tính ổn định ở trạng thái cân bằng ổn định theo qui định nếu nhiễu loạn nhỏ tạm thời hoặc tác động điều khiển đầu vào gây ra đáp ứng của xe luôn tăng mà không dao động (xem A.3).
7.2.7. Tính mất ổn định dao động (oscillatory instability): Đặc tính ổn định ở trạng thái cân bằng ổn định theo qui định nếu nhiễu loạn nhỏ tạm thời hoặc tác động điều khiển đầu vào gây ra đáp ứng của xe ở dạng dao động có biên độ luôn tăng xung quanh trạng thái cân bằng ổn định ban đầu (xem A.4).
7.3. Đo mức độ đáp ứng – Gradien
Gradien là mức độ thay đổi của thông số A so với thông số B phụ thuộc vào một số trạng thái cân bằng ổn định đã cho. Mức độ thay đổi này được viết:

7.3.1. Độ nhạy lái (steering sensitivity):

7.3.2. Gradien góc lái (steer angle gradient):

7.3.3. Gradien góc lái chuẩn động lực học (dynamic reference steer angle gradient):

7.3.4. Gradien góc vành tay lái (steering-wheel angle gradient):

Chú thích: Gradien này là nghịch đảo của độ nhạy lái
7.3.5. Gradien mô men quay vành tay lái (steering-wheel torque gradient):

7.3.6. Gradien góc nghiêng ngang
7.3.6.1. Gradien góc nghiêng ngang xe (vehicle roll angle gradient):

7.3.6.2. Gradien góc nghiêng ngang của hệ treo (suspension roll angle gradient):

7.3.7. Gradien góc trượt ngang xe (sideslip angle gradient):

7.3.8. Gradien góc vành tay lái / góc trượt ngang xe (steering-wheel/sideslip angle gradient):

7.3.9. Gradien quay vòng thiếu (understeer gradient):

7.3.10. Hệ số ổn định (stability factor):

7.3.11. Hệ số hướng (directional coefficient):

7.4. Đặc tính lái (xem A.5 và hình B.3)
7.4.1. Quay vòng thiếu (understeer): Đặc tính quay vòng ở trạng thái cân bằng ổn định khi gradien quay vòng thiếu là dương.
7.4.2. Quay vòng thừa (oversteer): Đặc tính quay vòng ở trạng thái cân bằng ổn định khi gradien quay vòng thiếu là âm.
7.4.3. Quay vòng đúng (neutral steer): Đặc tính quay vòng ở trạng thái cân bằng ổn định khi gradien quay vòng thiếu bằng không.
7.4.4. Tốc độ tới hạn (critical speed) vX, crit: Vận tốc dọc xe đối với xe quay vòng thừa tại đó độ nhạy lái ở gia tốc ngang xe bằng không trở nên vô hạn.
8. Bánh và lốp xe
Trong điều này, thuật ngữ “bánh xe” chỉ cụm bánh/lốp xe. Các thuật ngữ được định nghĩa ở đây liên quan đến hệ trục bánh xe. Các ghi chú cho phép định nghĩa đối với các hệ trục khác (xem Điều 2).
Ngoài ra, các chữ XW, YW, ZW có thể có các chỉ số để chỉ rõ bánh xe được xem xét. Số lẻ chỉ bánh xe bên tay trái và số chẵn chỉ bánh xe bên tay phải theo thứ tự trục từ trước đến sau.
8.1. Hướng bánh xe
8.1.1. Hệ trục bánh xe (wheel axis system) XW, YW, ZW: Hệ trục vuông góc theo qui tắc bàn tay phải trong đó mặt phẳng XWYW trùng với mặt phẳng XEYE, trục XW là giao tuyến của mặt phẳng bánh xe với mặt phẳng XEYE có chiều dương hướng về phía trước. Trục ZW chỉ hướng lên trên và gốc đặt tại tâm tiếp xúc lốp.
8.1.2. Góc trượt bánh xe (slip angle) a: Góc từ trục XW đến tiếp tuyến với đường đi của tâm tiếp xúc lốp. Góc này dương khi mở về bên trái.
8.1.3. Góc nghiêng bánh xe (trong hệ trục bánh xe) (inclination angle) eW: Góc từ trục ZW đến mặt phẳng bánh xe. Góc này dương khi mở về bên phải.
CHÚ THÍCH: Góc này có cùng độ lớn như góc nghiêng bánh xe trong hệ trục trung gian eV.
8.2. Đặc tính lăn
8.2.1. Bán kính chất tải tĩnh (static loaded radius) rstat: Khoảng cách giữa tâm bánh xe và tâm tiếp xúc lốp được đo ở điều kiện xác định về tải, áp suất hơi lốp và vành (chiều rộng và tiết diện) lắp lốp.
CHÚ THÍCH: Trị số này thường được cho ở góc nghiêng bánh xe bằng không.
8.2.2. Chu vi lăn động lực học (dynamic rolling circumference) CR: Khoảng cách di chuyển trên mặt đỗ xe trong một vòng quay bánh xe ở những điều kiện xác định về tải trọng, áp suất hơi lốp, nhiệt độ, tốc độ …
8.2.3. Bán kính lăn động lực học (dynamic rolling radius): 

8.2.4. Bánh xe lăn tự do (free-rolling wheel): Bánh xe lăn có chất tải, không chịu mô men phanh và lái ở điều kiện xác định.
8.2.5. Tốc độ quay bánh xe (wheel rotation speed) ω: Vận tốc góc của bánh xe xung quanh trục quay của nó, có giá trị dương khi xe chuyển động về phía trước.
8.2.6. Tốc độ quay của bánh xe lăn tự do theo đường thẳng (wheel rotation speed of straight free- rolling wheel) ω0: Tốc độ quay của bánh xe lăn tự do chuyển động theo đường thẳng ở góc nghiêng bánh xe và góc trượt bánh xe bằng không.
8.2.7. Lực cản lăn của lốp (rolling resistance of tyre): FR: Tổn thất (hoặc tiêu hao) năng lượng trong lốp trên một đơn vị khoảng cách. Trị số này tương đương với lực kéo.
8.2.8. Hệ số cản lăn (rolling resistance coefficient) (thường được trình bày dưới dạng 1/1000):

8.3. Lực và mô men bánh xe
Ngoại lực từ mặt đường tác dụng lên bánh xe vào bất kỳ lúc nào cũng có thể được tổng hợp thành một véc tơ phản lực  và một véc tơ mô men phản lực
và một véc tơ mô men phản lực  từ mặt đất.
từ mặt đất.
8.3.1. Các thành phần phản lực của mặt đỗ xe tác dụng lên bánh xe 
8.3.1.1. Lực dọc tác dụng lên bánh xe (longitudunal force at wheel)  : Thành phần phản lực từ mặt đất theo hướng trục XW.
: Thành phần phản lực từ mặt đất theo hướng trục XW.
8.3.1.2. Lực ngang tác dụng lên bánh xe (lateral force at wheel)  : Thành phần phản lực từ mặt đất theo hướng trục YW.
: Thành phần phản lực từ mặt đất theo hướng trục YW.
8.3.1.3. Lực thẳng đứng tác dụng lên bánh xe (vertical force at wheel)  : Thành phần phản lực từ mặt đất theo hướng trục ZW.
: Thành phần phản lực từ mặt đất theo hướng trục ZW.
8.3.2. Thành phần của mô men phản lực từ mặt đất 
8.3.2.1. Mô men nghiêng (overturning moment)  : Thành phần mô men phản lực từ mặt đất theo hướng trục XW.
: Thành phần mô men phản lực từ mặt đất theo hướng trục XW.
![]() 8.3.2.2. Mô men cản lăn (rolling moment)
8.3.2.2. Mô men cản lăn (rolling moment)  : Thành phần mô men phản lực từ mặt đất theo hướng trục YW.
: Thành phần mô men phản lực từ mặt đất theo hướng trục YW.
8.3.2.3. Mô men chỉnh thẳng (aligning moment)  : Thành phần mô men phản lực từ mặt đất theo hướng trục ZW.
: Thành phần mô men phản lực từ mặt đất theo hướng trục ZW.
CHÚ THÍCH: Nói chung, đây là mô men chỉnh đặt, được gọi là “mô men tự chỉnh thẳng”.
8.4. Đặc tính theo phương dọc
8.4.1. Hệ số lực dọc (longitudinal force coefficient) μxw: Tỷ số giữa lực dọc trên bánh xe và tải thẳng đứng tác dụng lên bánh xe. Hệ số này dương trong trường hợp của lực kéo.

8.4.2. Hệ số lực dọc bánh xe lớn nhất (maximum longitudinal force coefficient) μxw, max: Giá trị lớn nhất của μxw đạt được khi bánh xe bị trượt dọc trên bề mặt đã biết ở điều kiện xác định. (Xem hình B.4)
8.4.3. Hệ số lực phanh khi trượt dọc (sliding braking force coefficient) μxw, lock: Giá trị hệ số lực dọc μxw đạt được ở bánh xe bị phanh cứng trên bề mặt đã biết ở điều kiện xác định. (Xem hình B.4)
CHÚ THÍCH: Hệ số này có giá trị âm.
8.4.4. Hệ số sử dụng độ bám dọc (longitudinal adhesion utilization coefficient)  :
:

CHÚ THÍCH: Hệ số này có giá trị dương.
8.4.5. Vận tốc góc bánh xe khi trượt dọc (longitudinal slip angular velocity): ω – ω0
Cả hai tốc độ quay đo được ở cùng vận tốc tuyến tính của tâm bánh xe theo hướng trục XW. Vận tốc góc này có giá trị dương khi được tạo ra từ mô men kéo.
![]() 8.4.6. Hệ số trượt dọc (longitudinal slip)
8.4.6. Hệ số trượt dọc (longitudinal slip)  :
:

8.4.7. Hệ số trượt dọc tới hạn (critical longitudinal slip)  : Giá trị hệ số trượt dọc
: Giá trị hệ số trượt dọc  tại đó hệ số lực dọc là lớn nhất,
tại đó hệ số lực dọc là lớn nhất,  . Hệ số này dương trong trường hợp lực kéo. (Xem hình B.4)
. Hệ số này dương trong trường hợp lực kéo. (Xem hình B.4)
8.4.8. Lực dọc tác dụng lên bánh xe/ hệ số trượt dọc (longitudinal force / longitudinal slip gradient):

8.5. Đặc tính và độ cứng ngang
![]() 8.5.1. Hệ số lực ngang (lateral force coefficient) μY w:
8.5.1. Hệ số lực ngang (lateral force coefficient) μY w:

8.5.2. Hệ số lực ngang lớn nhất (maximun lateral force coefficient) μY w , max: Giá trị lớn nhất của μY w đạt được khi bánh xe lăn tự do trên bề mặt xác định và ở điều kiện xác định.
![]() 8.5.3. Hệ số lực trượt ngang (sliding lateral force coefficient) μY w , lock: Giá trị hệ số lực ngang μY w khi thành phần dọc của véc tơ vận tốc góc bánh xe và tốc độ quay bánh xe bằng không.
8.5.3. Hệ số lực trượt ngang (sliding lateral force coefficient) μY w , lock: Giá trị hệ số lực ngang μY w khi thành phần dọc của véc tơ vận tốc góc bánh xe và tốc độ quay bánh xe bằng không.
8.5.4. Góc trượt bánh xe tới hạn (critical slip angle) acrit: Giá trị của góc trượt bánh xe mà tại đó lực ngang tác dụng lên bánh xe đạt giá trị lớn nhất ở điều kiện xác định.
8.5.5. Độ cứng chống xoay bánh xe (cornering stiffness):

CHÚ THÍCH: Độ cứng này thường được đánh giá tại góc trượt bánh xe bằng không.
8.5.6. Độ cứng chống nghiêng bánh xe (camber stiffness)

CHÚ THÍCH: Độ cứng này thường được đánh giá tại góc nghiêng bằng không.
8.5.7. Độ cứng ngang bánh xe (lateral stiffness): Tỷ lệ giữa giá trị thay đổi lực ngang bánh xe và dịch chuyển tương đối của tâm bánh xe so với mặt đỗ xe theo chiều âm của trục YW.
CHÚ THÍCH: Độ cứng này thường được xác định tại góc nghiêng và tốc độ quay bánh xe bằng không.
Phụ lục A
(tham khảo)
GIẢI THÍCH THUẬT NGỮ VÀ ĐỊNH NGHĨA
A.1. Tâm tiếp xúc lốp có thể không phải là tâm hình học của vùng tiếp xúc vì biến dạng sinh ra do lực tác dụng.
A.2. Các xe chở người bộc lộ các đặc tính khác nhau tùy theo điều kiện thử và trạng thái cân bằng ổn định riêng. Điều kiện thử liên quan đến tình trạng xe như tải trên bánh xe, sự chỉnh thẳng bánh trước, áp suất hơi lốp cũng như điều kiện thời tiết và mặt đường ảnh hưởng đến những thông số của xe. Ví dụ, nhiệt độ có thể làm thay đổi đặc tính tắt dần (dao động) và bề mặt đường trơn trượt có thể làm thay đổi đặc tính quay vòng của lốp. Trạng thái cân bằng ổn định được định nghĩa trước đây là tình trạng hoạt động của xe trong môi trường đã định và có thể xác định được phần nào bằng góc lái, vận tốc dọc và gia tốc ngang. Do tất cả các yếu tố này làm thay đổi trạng thái hoạt động của xe nên khả năng ổn định của xe cần được xem xét riêng rẽ ứng với mỗi điều kiện môi trường và trạng thái cân bằng ổn định.
Đối với một tập hợp các thông số xe đã định và điều kiện thử riêng, xe có thể được xem xét ứng với mỗi trạng thái cân bằng ổn định đạt được theo lý thuyết. Những điều kiện ảnh hưởng lớn nhất đến sự ổn định là các giá trị ổn định của vận tốc dọc và gia tốc ngang. Trên thực tế, xe có khả năng ổn định ở một tập hợp các điều kiện hoạt động và không ổn định ở các điều kiện khác.
A.3. Tính mất ổn định không theo chu kỳ có thể được minh họa bằng hoạt động của xe ở tốc độ trên tốc độ tới hạn khi quay vòng thừa. Tác động đầu vào bất kỳ lên vành tay lái sẽ làm xe quay vòng với bán kính luôn giảm trừ khi người lái có tác động bù vào vành tay lái để duy trì trạng thái cân bằng. Trạng thái này đặc trưng cho tính mất ổn định không theo chu kỳ (xem hình B.3). Mô hình toán học tuyến tính của xe là không ổn định khi phương trình đặc tính của nó có nghiệm thực dương.
A.4. Tính mất ổn định dao động có thể được minh họa bằng sự đáp ứng điều khiển tự do sau khi có tác dụng của một xung dịch chuyển hoặc lực lên vành tay lái. Một số xe lúc đầu quay vòng về một phía nhưng sau đó về phía bên kia và cứ như vậy cho đến khi biên độ chuyển động tăng đến giới hạn xe “xoay tròn” Trong trường hợp này, xe không thay đổi hướng chuyển động chung nhưng không đạt được trạng thái ổn định cân bằng và có chuyển động dao động. Mô hình toán học tuyến tính của xe là mất ổn định dao động khi phương trình đặc tính của nó có nghiệm phức với phần thực dương.
A.5. Do xe là một hệ thống không tuyến tính và không có những đặc tính giống nhau ở mọi trạng thái cân bằng ổn định nên xe có thể quay vòng thiếu đối với tác động đầu vào nhỏ và quay vòng thừa đối với tác động đầu vào lớn hoặc ngược lại (xem hình B.3). Vì vậy, cần thiết phải xác định phạm vi tác động đầu vào và vận tốc khi xem xét đặc tính lái của xe.
Phụ lục B
(tham khảo)
Minh họa các đặc tính cơ bản
Hình B.1 - Định nghĩa các góc
Hình B.2 - Sự lái

CHÚ THÍCH: Minh họa này chỉ áp dụng đối với tốc độ xe và tỷ số lái toàn phần không đổi
Hình B.3 - Đặc tính quay vòng
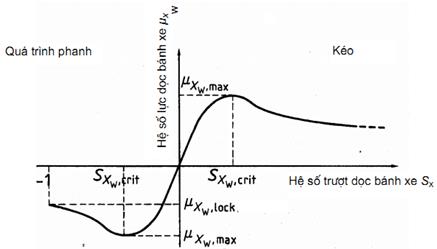
Hình B.4 - Hệ số lực dọc so với hệ số trượt dọc
Bạn chưa Đăng nhập thành viên.
Đây là tiện ích dành cho tài khoản thành viên. Vui lòng Đăng nhập để xem chi tiết. Nếu chưa có tài khoản, vui lòng Đăng ký tại đây!
